
Note: This is a historical page and is not actively maintained since August 1 2025. Visit my active homepage for an up-to-date version.
I am a Lecturer and Principal Investigator at ETH Zurich, leading the Artificial Visual Intelligence group (AVI) under the umbrella of the Photogrammetry and Remote Sensing lab of Prof. Konrad Schindler. My broad research fields are Computer Vision, Artificial Intelligence and Machine Learning. The focus of my research is on 3D and semantic visual perception, where I develop hybrid, data-driven yet informed, vision models and representations and I emphasize embodied applications such as autonomous cars and robots. From 2021 to 2025, I was the Principal Investigator at Computer Vision Lab of ETH for TRACE, a large-scale project on Computer Vision for autonomous cars and robots funded by Toyota Motor Europe. I teach the Master courses "Computer Vision and Artificial Intelligence for Autonomous Cars" at ETH and "Computer Vision" at University of St. Gallen. I obtained my PhD in Electrical Engineering and Information Technology from ETH Zurich in 2021, supervised by Prof. Luc Van Gool. Prior to my doctoral studies, I received the MSc in Computer Science from ETH Zurich in 2016 and the Diploma in Electrical and Computer Engineering from National Technical University of Athens in 2014, conducting my Diploma thesis at the CVSP group supervised by Prof. Petros Maragos.
News
|
2025-06-06: YOTO is out! You can use it to automatically optimize the weights of your various losses in a single training run and avoid time-consuming searches. Code coming soon! |
|
2025-02-27: We got two papers accepted to CVPR 2025! They are UniK3D and PBR-NeRF. Associated code and models are publicly available! |
|
2025-02-27: UniDepthV2 is out! It ranks first on the KITTI Depth Prediction benchmark. Associated code is publicly available! |
|
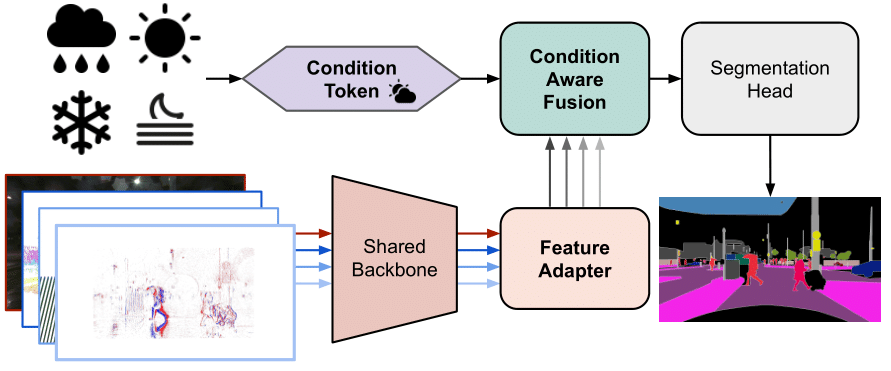
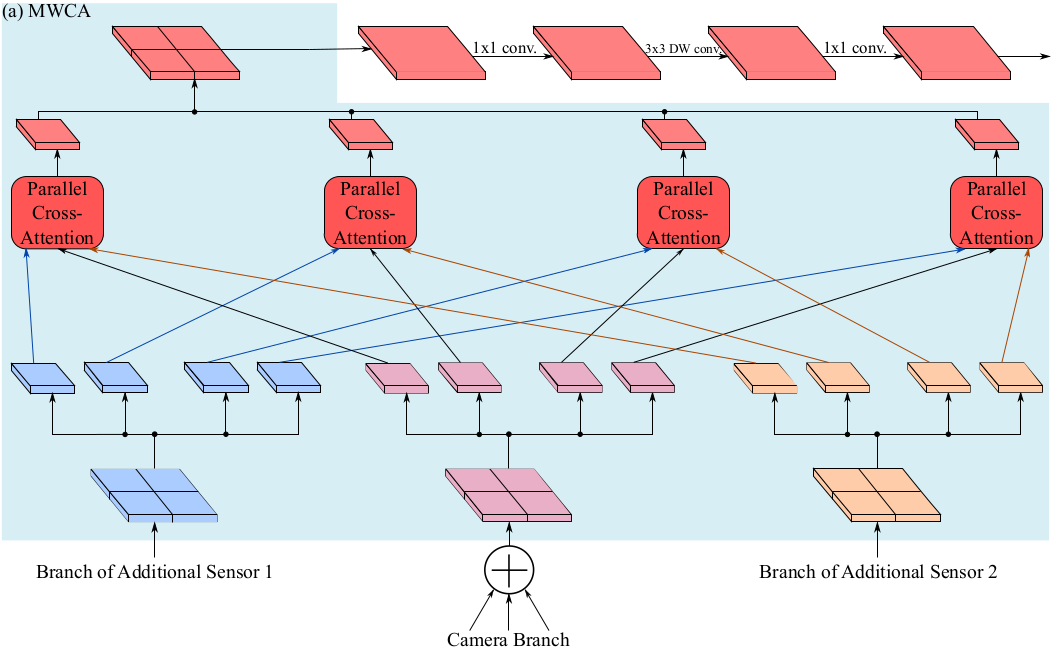
2025-01-12: We got a paper accepted to IEEE RA-L! It is CAFuser, a state-of-the-art multi-sensor fusion network for condition-aware and robust driving scene segmentation. Code and models coming soon! |
|
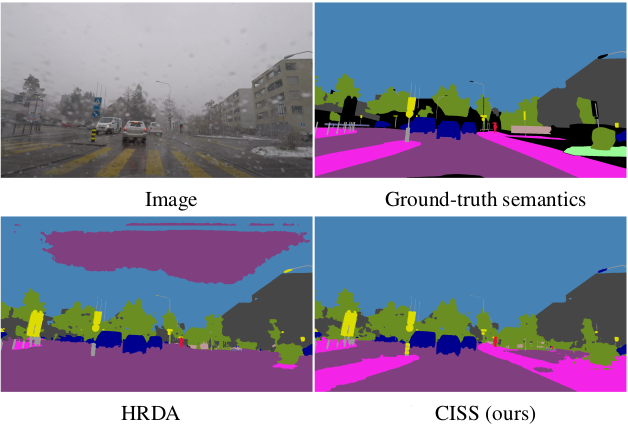
2025-01-09: We got a paper accepted to IEEE T-PAMI! It is Condition-Invariant Semantic Segmentation or CISS, a state-of-the-art method for domain-generalizing semantic segmentation. Associated code and models are publicly available. |
|
2024-10-28: We got two papers accepted to WACV 2025! They are SOLO - a method for photorealistic 3D-aware day-to-night simulation - as oral, and AsphaltNet - a 3D visual grounding network with fine-grained losses. Associated code and datasets are coming soon. |
|
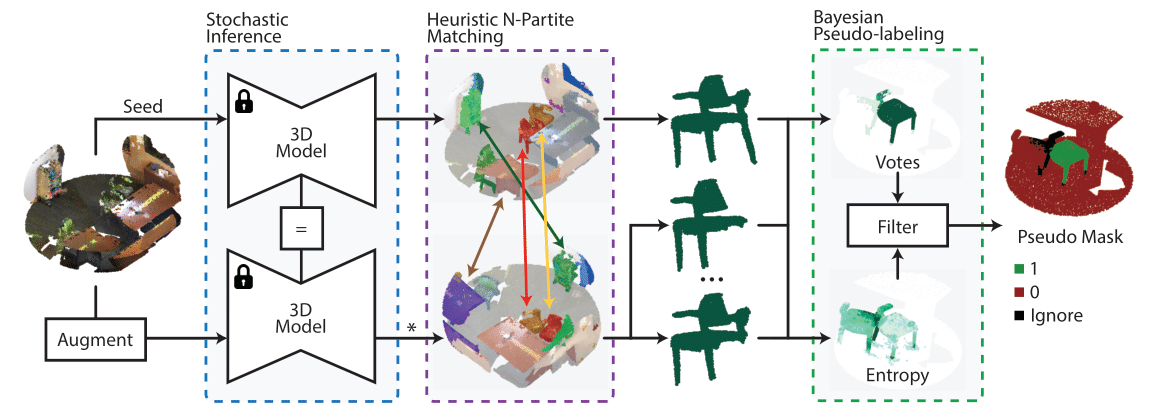
2024-07-01: We got three papers accepted to ECCV 2024! The MUSES dataset for multimodal segmentation, the ConcreteNet architecture for 3D visual grounding, and Bayesian Self-Training for 3D segmentation. Associated datasets, benchmarks and code are publicly available. |
|
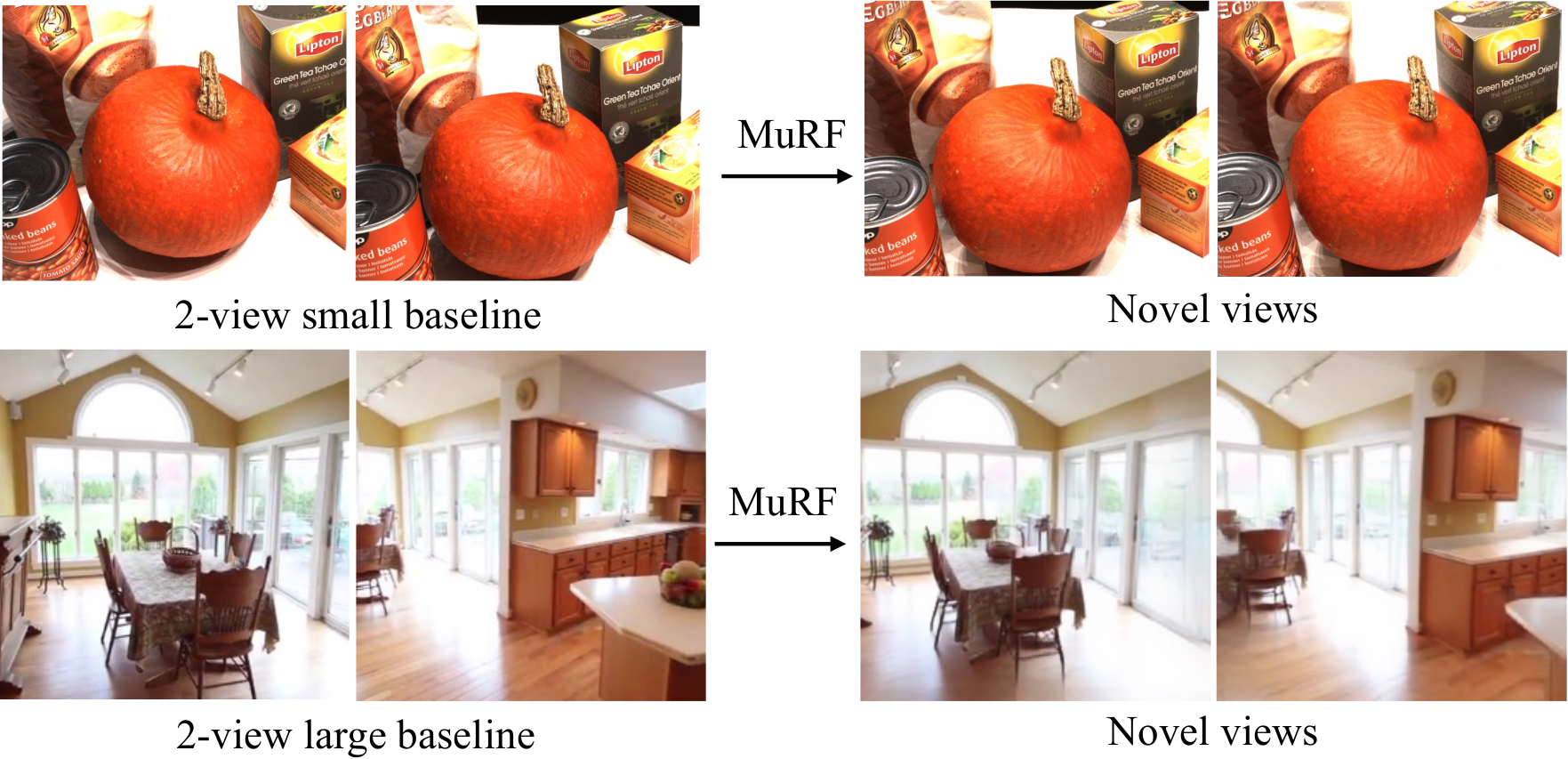
2024-04-04: We got three papers accepted to CVPR 2024: UniDepth and VPSeg as highlights (top 3% of total submissions), and MuRF. Associated code is publicly available. |
|
2024-03-23: We got a paper accepted to SIGGRAPH 2024: Radar Fields. Associated code is publicly available. |
|
2022-12-19: I have received the ETH Zurich Career Seed Award 2022, which will support the proposed independent research project I will lead in 2023, titled "Nighttime Photorealistic Simulation for Robust Semantic Driving Scene Understanding". |
Publications
2025 2024 2023 2022 2021 2020 2019 2018 2017
|
You Only Train Once |
|
PBR-NeRF: Inverse Rendering with Physics-Based Neural Fields |
|
|
UniK3D: Universal Camera Monocular 3D Estimation |
|
|
Sun Off, Lights On: Photorealistic Monocular Nighttime Simulation for Robust Semantic Perception |
|
CAFuser: Condition-Aware Multimodal Fusion for Robust Semantic Perception of Driving Scenes |
|
Condition-Invariant Semantic Segmentation |
|
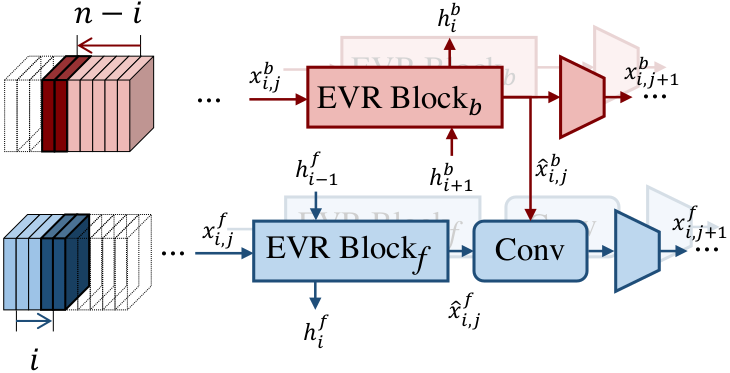
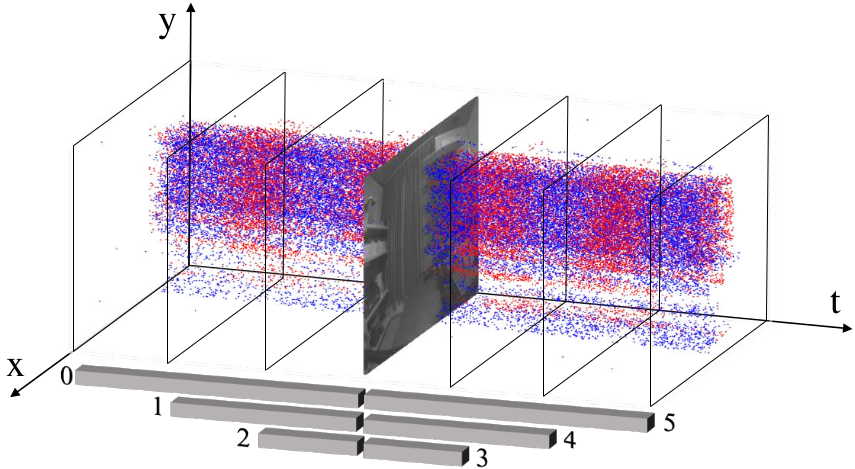
A Unified Framework for Event-based Frame Interpolation with Ad-hoc Deblurring in the Wild |
|
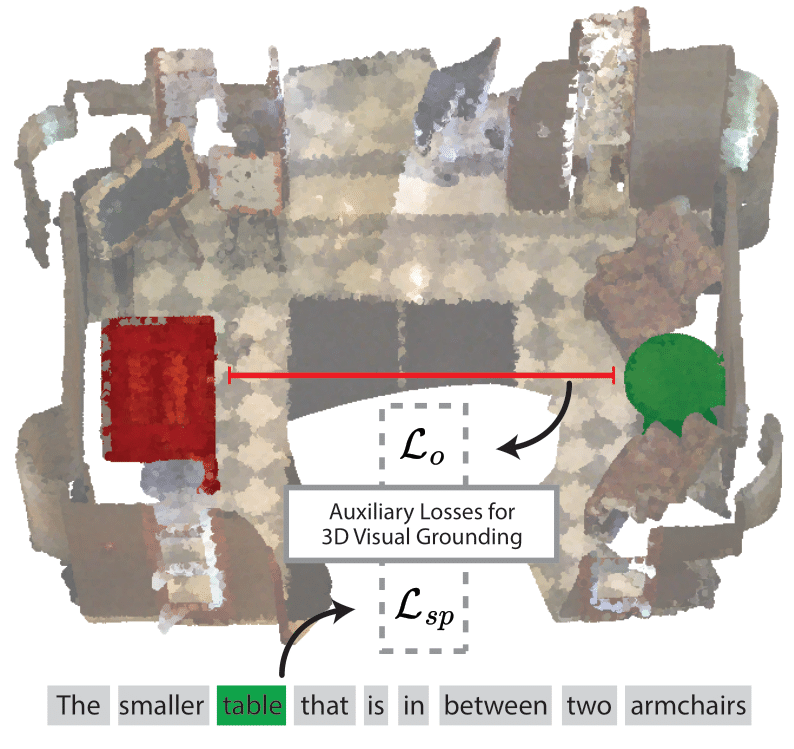
Fine-Grained Spatial and Verbal Losses for 3D Visual Grounding |
|
|
UniDepthV2: Universal Monocular Metric Depth Estimation Made Simpler |
|
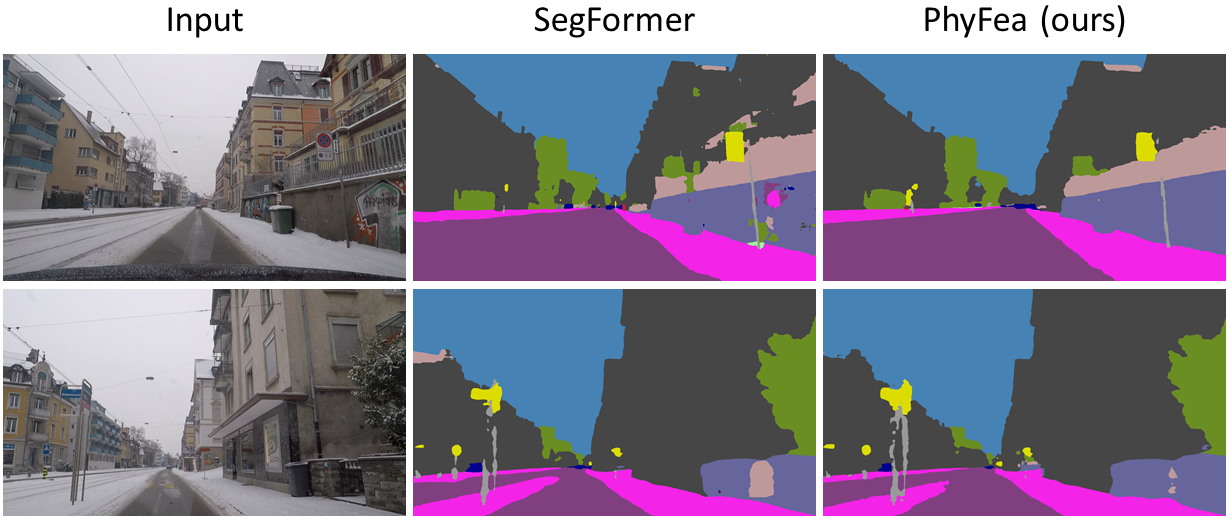
Physically Feasible Semantic Segmentation |
|
|
UniDepth: Universal Monocular Metric Depth Estimation |
|
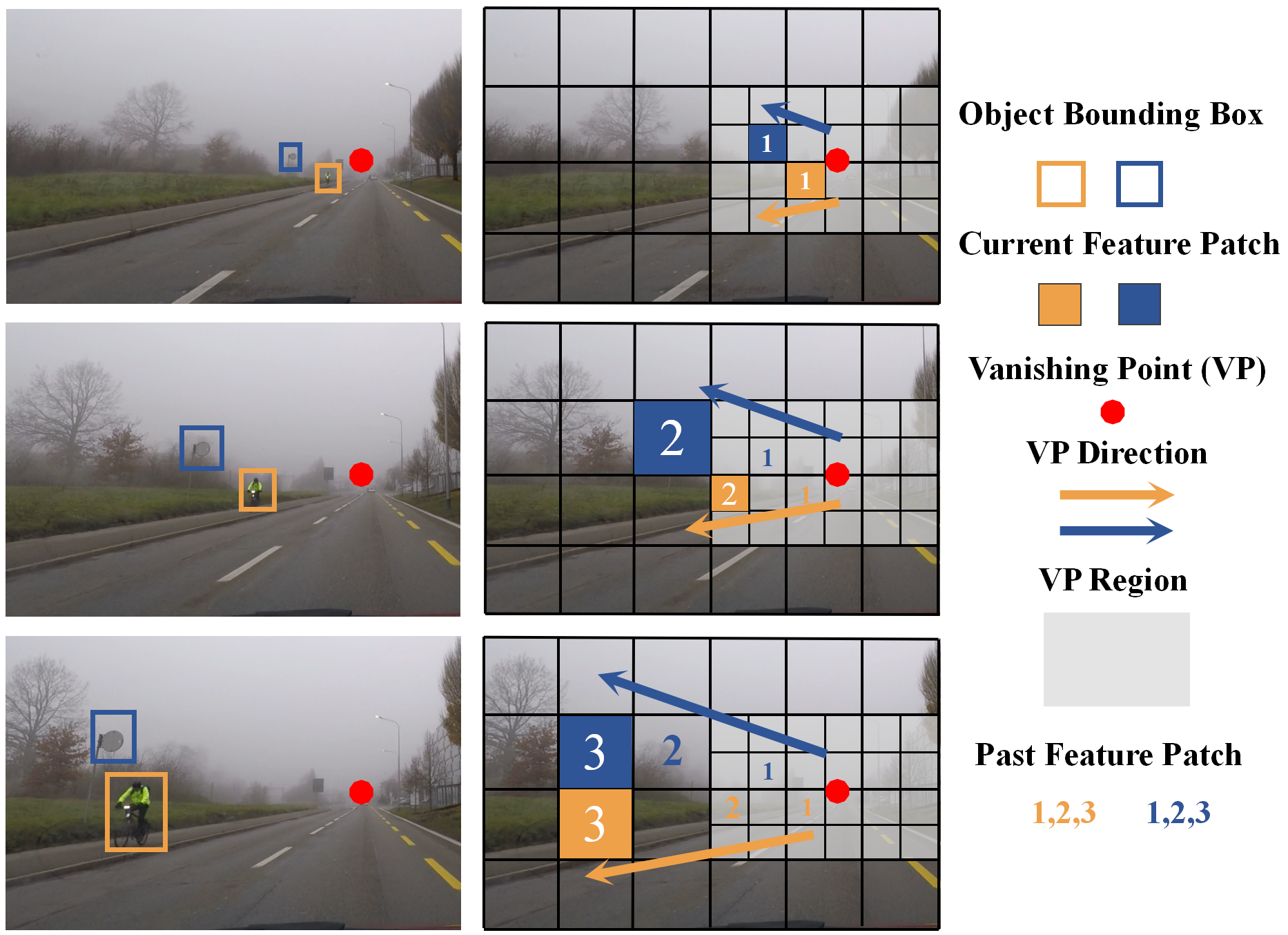
Vanishing-Point-Guided Video Semantic Segmentation of Driving Scenes |
|
MuRF: Multi-Baseline Radiance Fields |
|
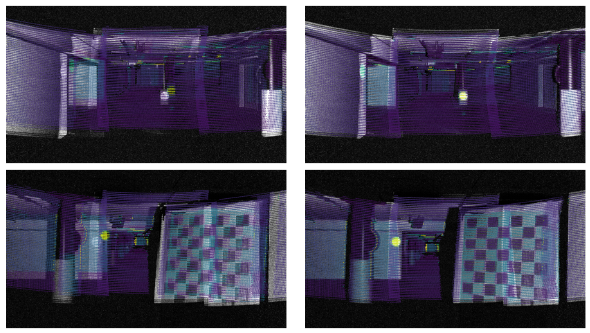
MUSES: The Multi-Sensor Semantic Perception Dataset for Driving under Uncertainty |

|
Four Ways to Improve Verbo-visual Fusion for Dense 3D Visual Grounding |
|
Bayesian Self-Training for Semi-Supervised 3D Segmentation |

|
Radar Fields: Frequency-Space Neural Scene Representations for FMCW Radar |

|
ACDC: The Adverse Conditions Dataset with Correspondences for Robust Semantic Driving Scene Perception |
|
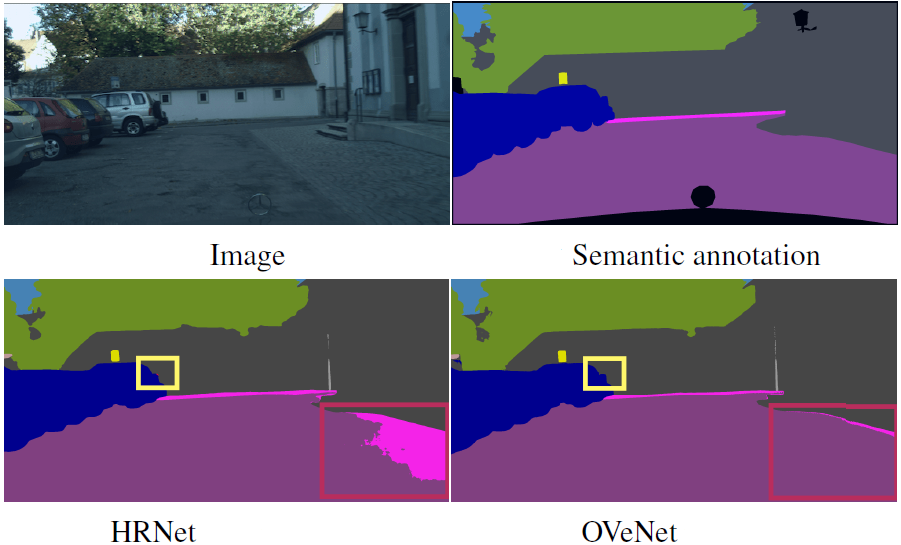
OVeNet: Offset Vector Network for Semantic Segmentation |

|
TT-NF: Tensor Train Neural Fields |
|
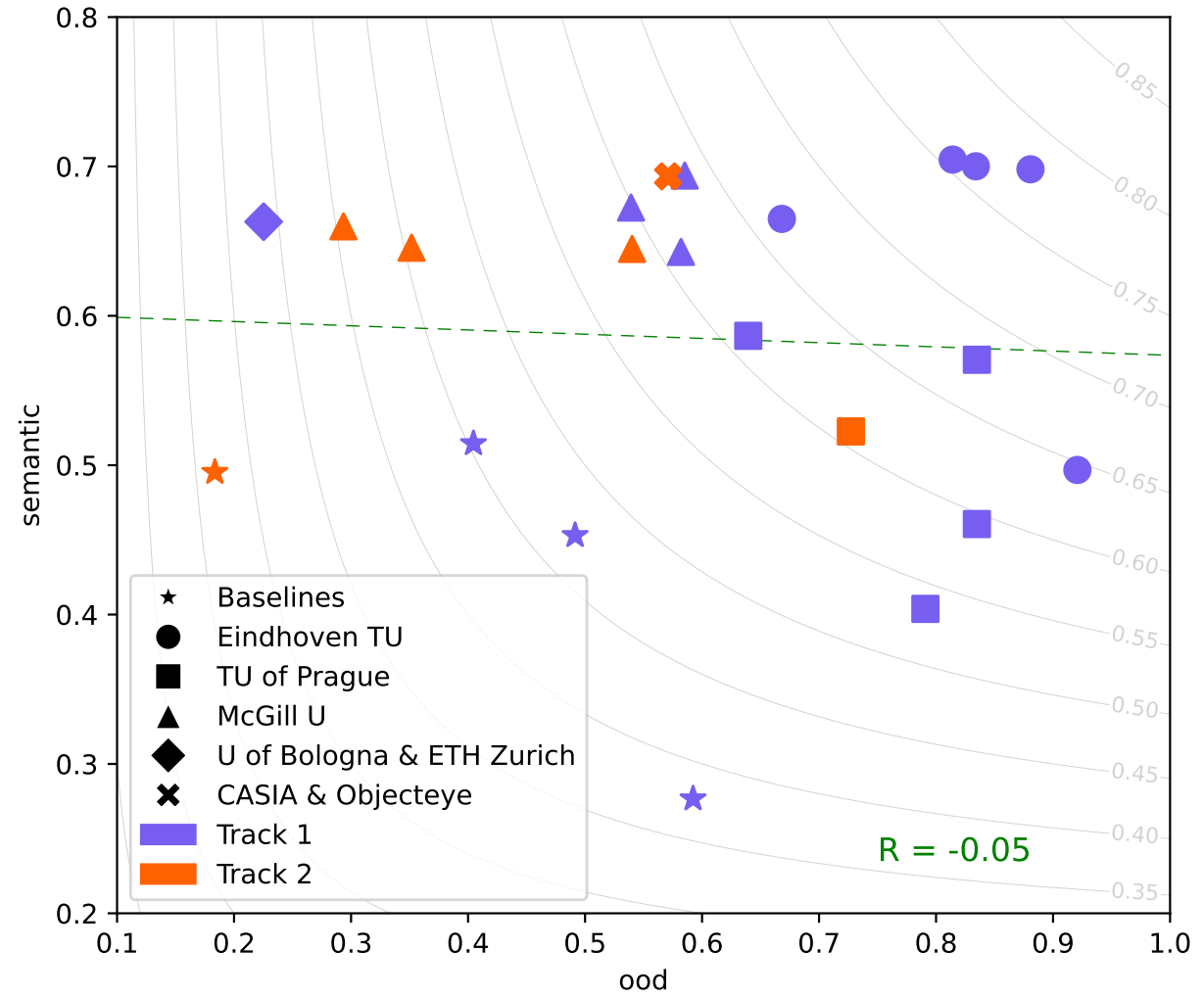
The BRAVO Semantic Segmentation Challenge Results in UNCV2024 |
|
TrafficBots V1.5: Traffic Simulation via Conditional VAEs and Transformers with Relative Pose Encoding |
|
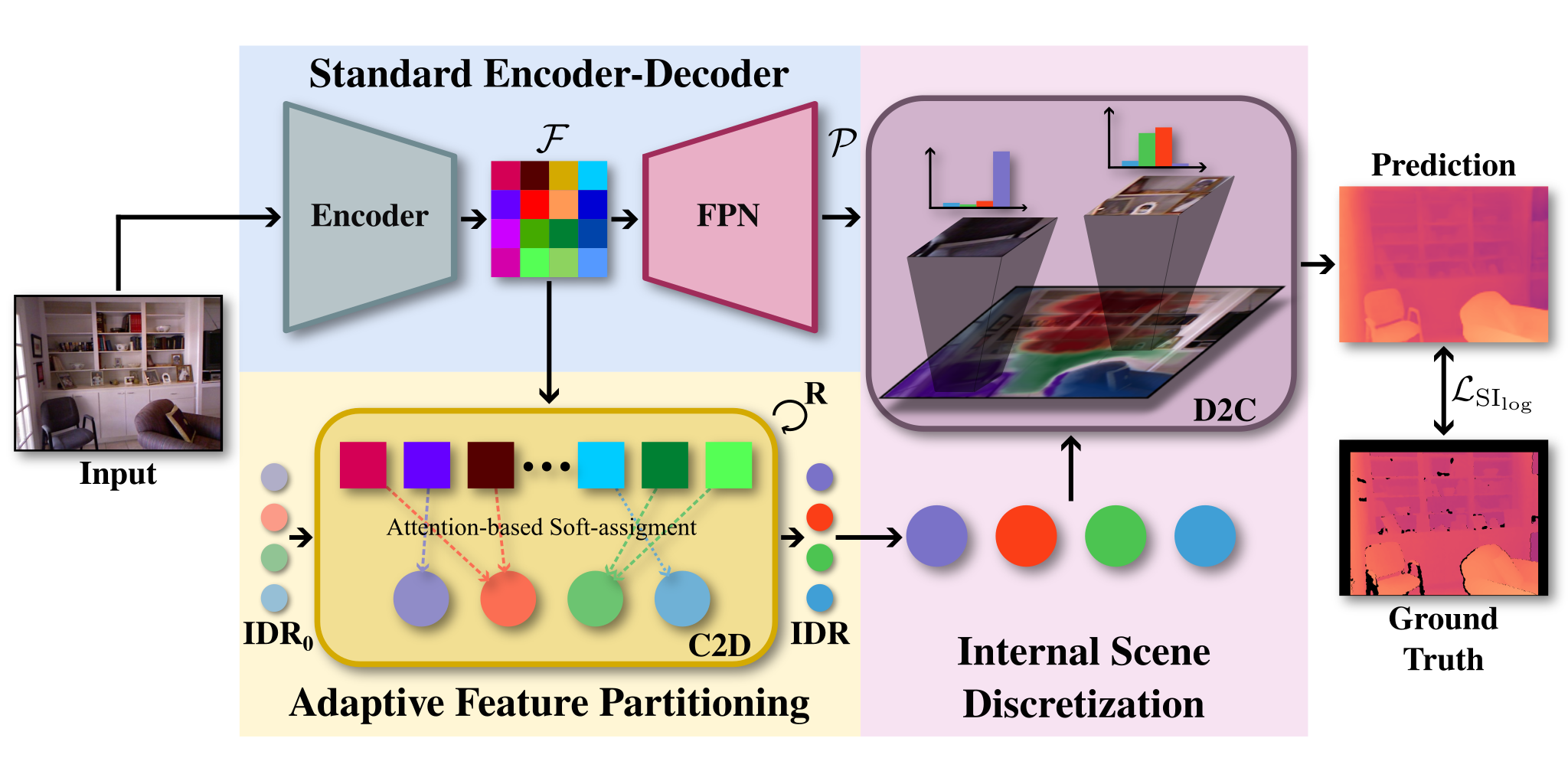
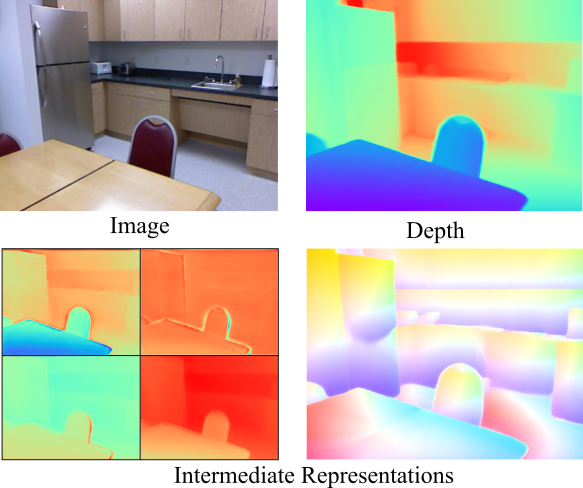
iDisc: Internal Discretization for Monocular Depth Estimation |
|
|
Event-Based Frame Interpolation with Ad-hoc Deblurring |
|
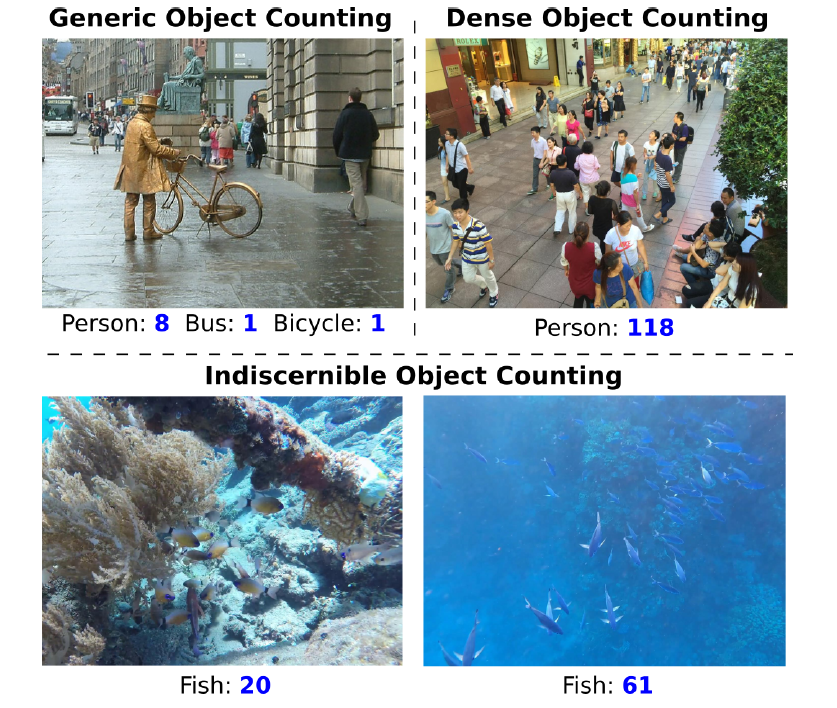
Indiscernible Object Counting in Underwater Scenes |
|
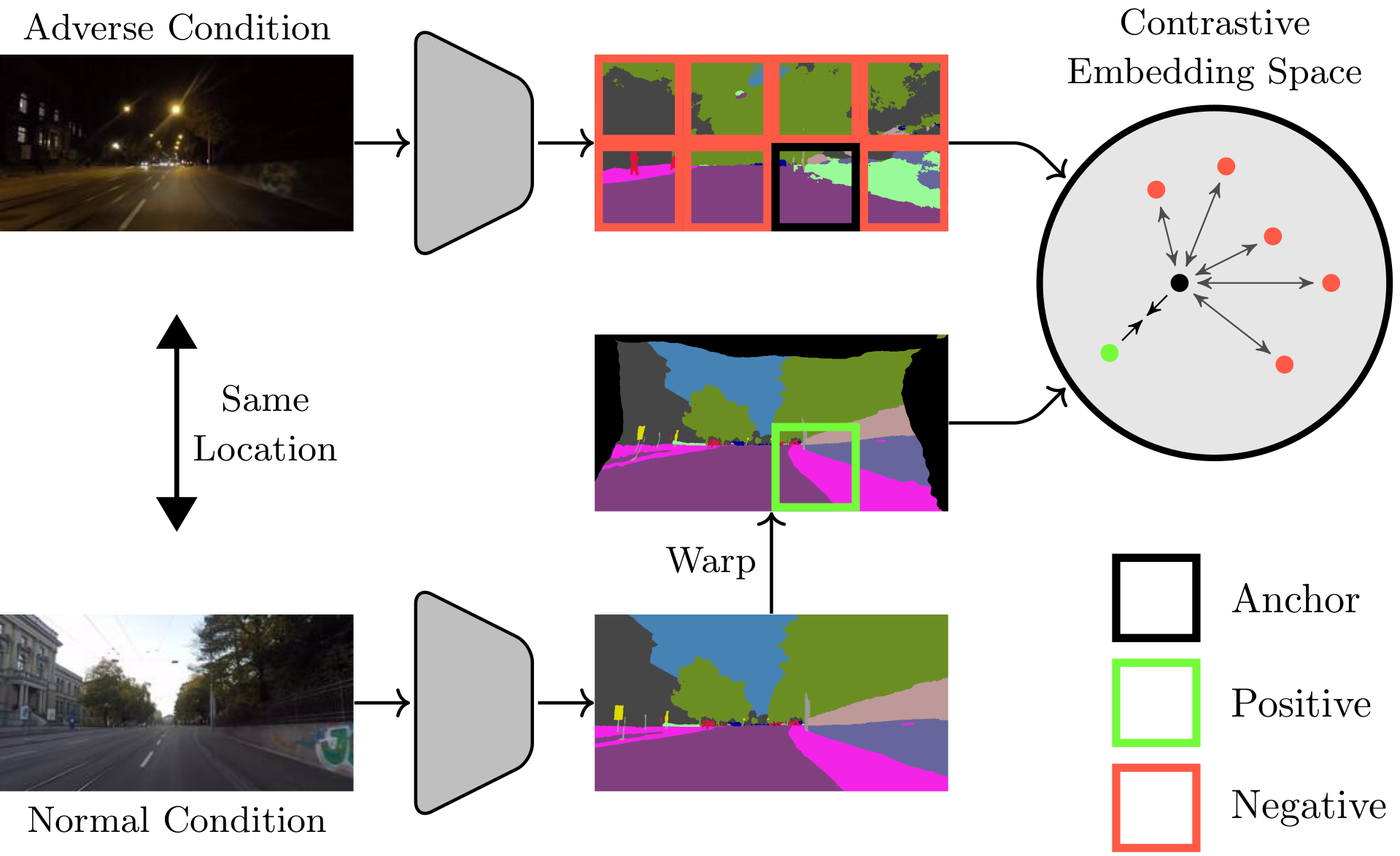
Contrastive Model Adaptation for Cross-Condition Robustness in Semantic Segmentation |
|
|
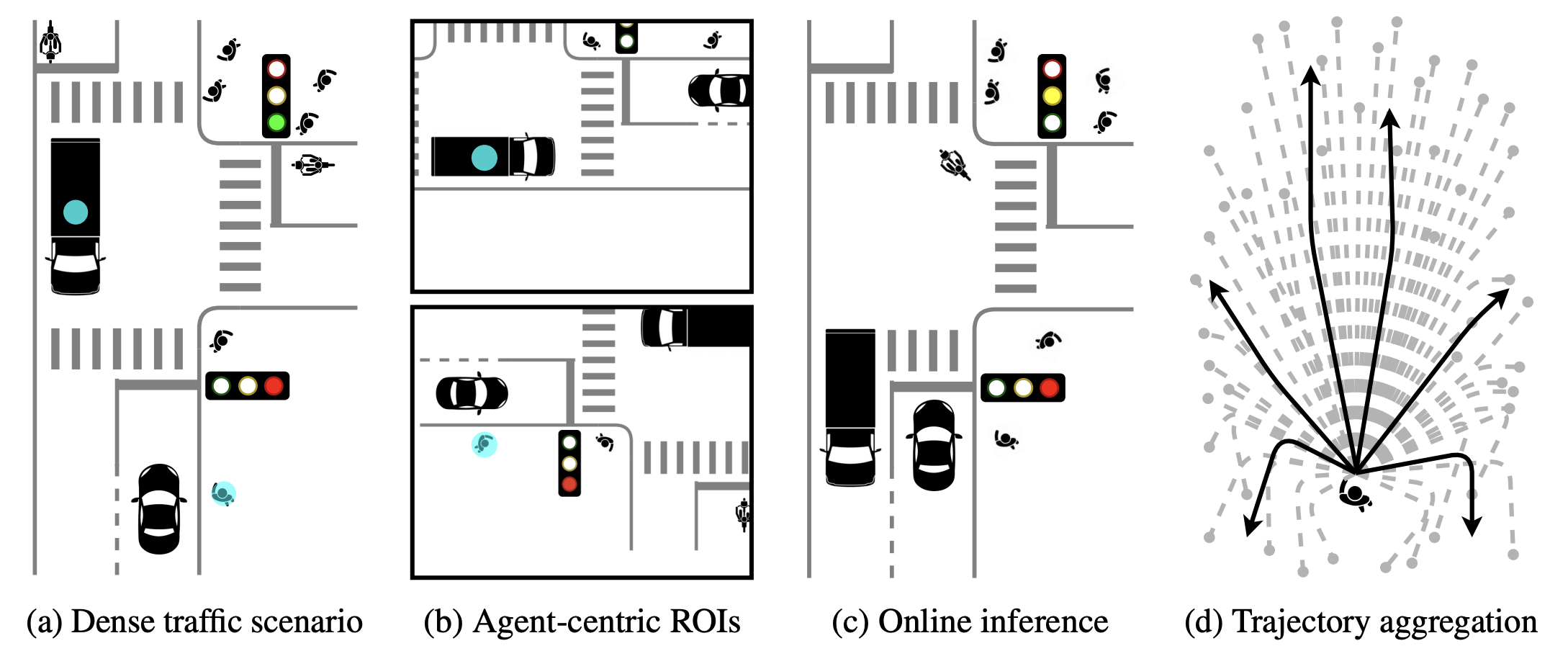
Real-Time Motion Prediction via Heterogeneous Polyline Transformer with Relative Pose Encoding |
|
HRFuser: A Multi-resolution Sensor Fusion Architecture for 2D Object Detection |
|
L2E: Lasers to Events for 6-DoF Extrinsic Calibration of Lidars and Event Cameras |

|
Maskomaly: Zero-Shot Mask Anomaly Segmentation |
|
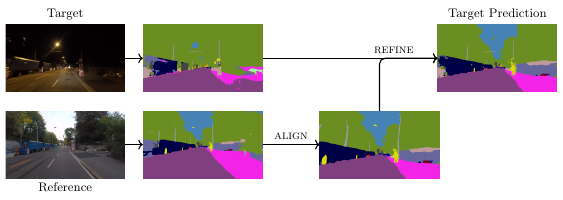
Refign: Align and Refine for Adaptation of Semantic Segmentation to Adverse Conditions |
|
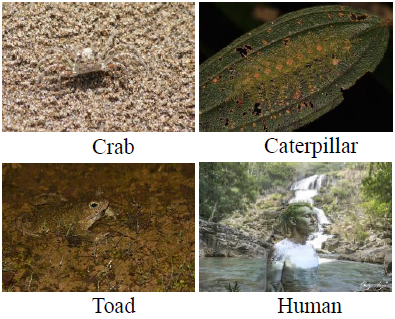
Advances in Deep Concealed Scene Understanding |
|
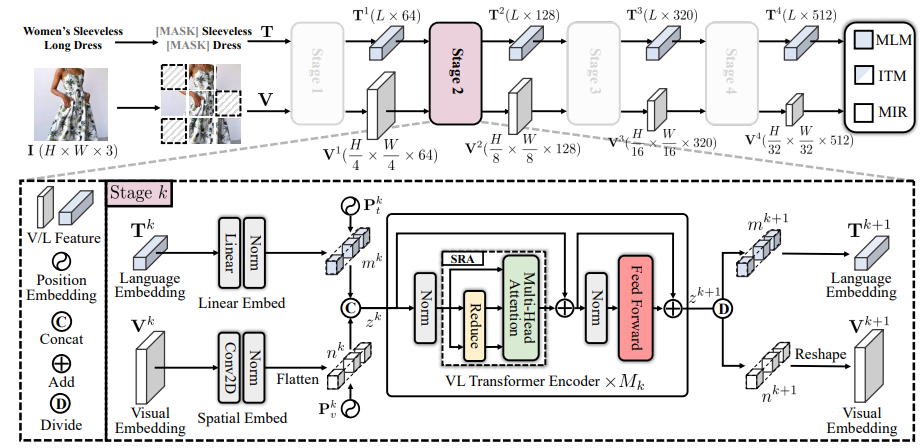
Masked Vision-language Transformer in Fashion |
|
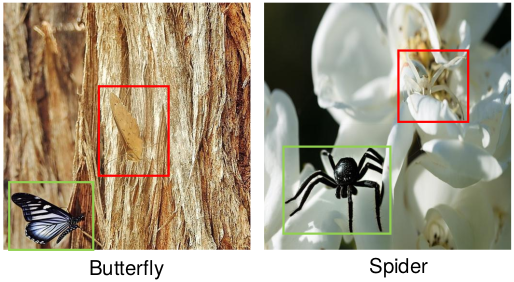
CamDiff: Camouflage Image Augmentation via Diffusion |
|
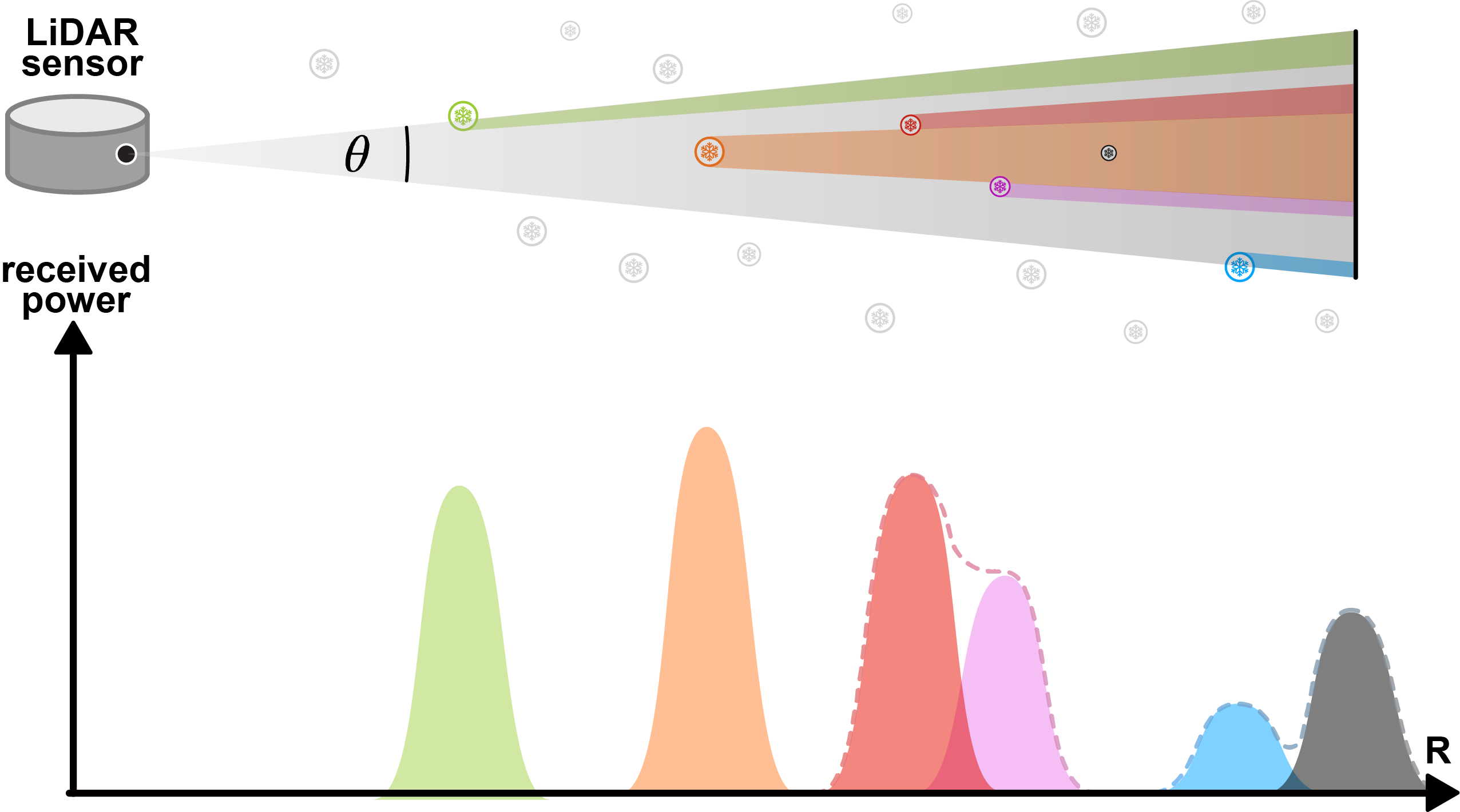
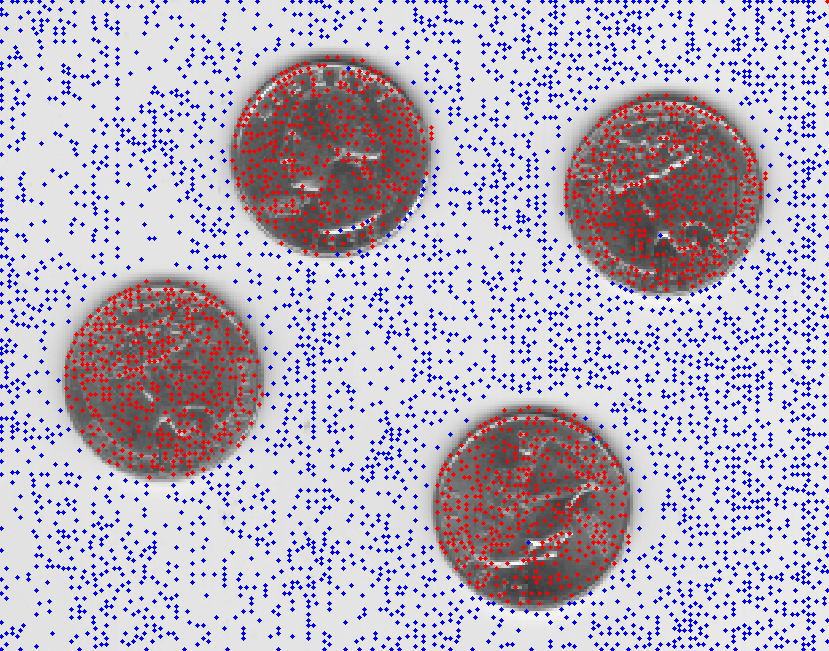
LiDAR Snowfall Simulation for Robust 3D Object Detection |
|
P3Depth: Monocular Depth Estimation with a Piecewise Planarity Prior |
|
Event-Based Fusion for Motion Deblurring with Cross-modal Attention |
|
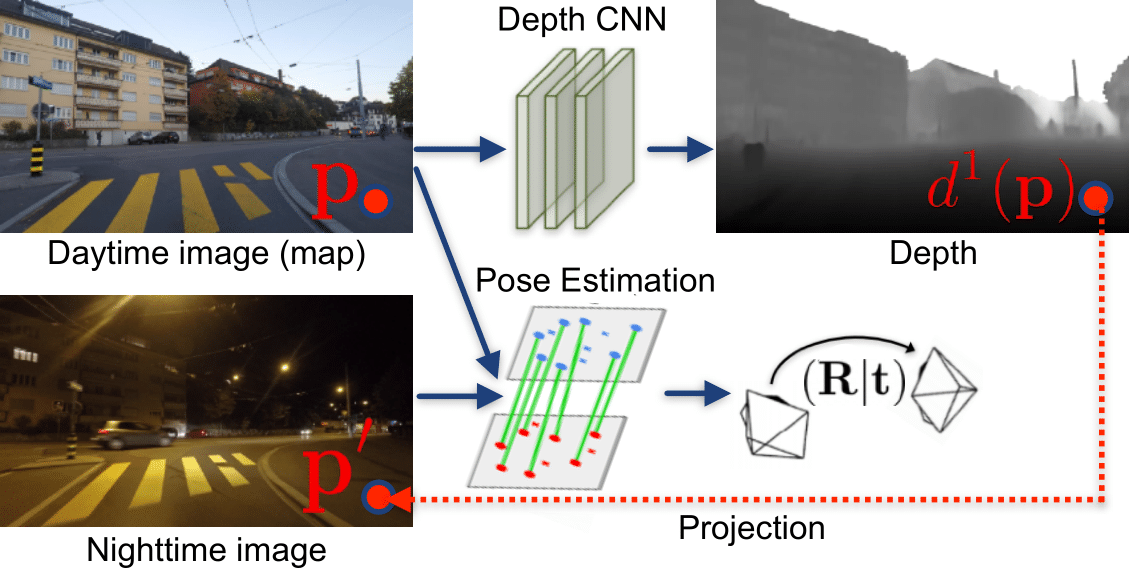
Map-Guided Curriculum Domain Adaptation and Uncertainty-Aware Evaluation for Semantic Nighttime Image Segmentation |
|
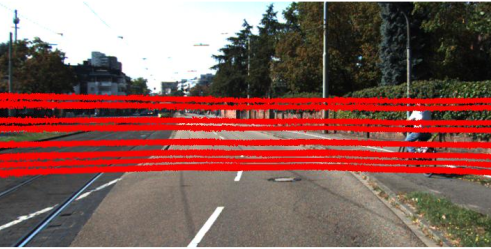
Lidar Line Selection with Spatially-Aware Shapley Value for Cost-Efficient Depth Completion |

|
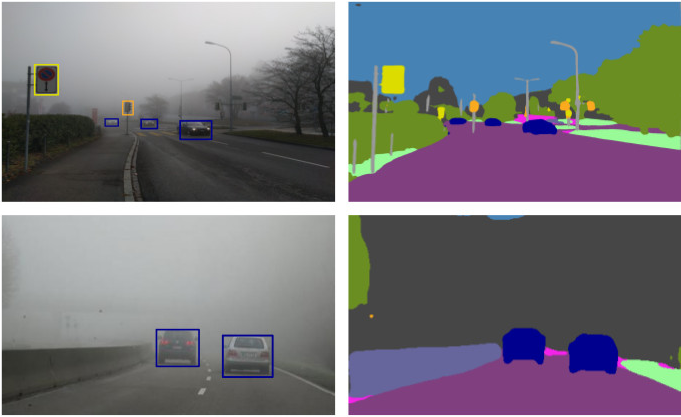
ACDC: The Adverse Conditions Dataset with Correspondences for Semantic Driving Scene Understanding |
|
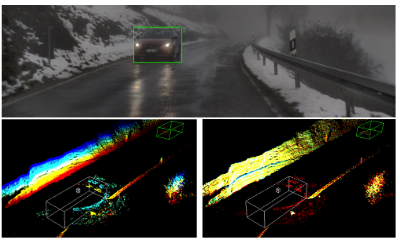
Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather |

|
Scale-Aware Domain Adaptive Faster R-CNN |

|
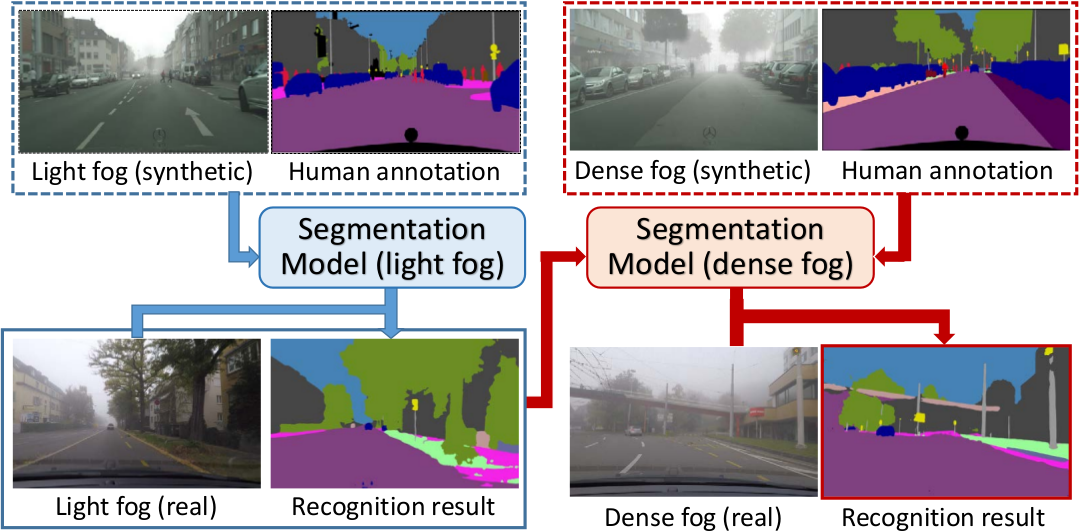
Curriculum Model Adaptation with Synthetic and Real Data for Semantic Foggy Scene Understanding |

|
Guided Curriculum Model Adaptation and Uncertainty-Aware Evaluation for Semantic Nighttime Image Segmentation |

|
Semantic Understanding of Foggy Scenes with Purely Synthetic Data |
|
Active Contour Methods on Arbitrary Graphs Based on Partial Differential Equations |
|
Model Adaptation with Synthetic and Real Data for Semantic Dense Foggy Scene Understanding |
|
|
Domain Adaptive Faster R-CNN for Object Detection in the Wild |
|
Semantic Foggy Scene Understanding with Synthetic Data |
|
|
Theoretical Analysis of Active Contours on Graphs |
Awards
|
ETH Zurich Career Seed Award 2022. Acquired a funding of CHF 30,000 from ETH Zurich aimed at excellent young researchers at an early postdoc stage to lead an independent research project titled "Nighttime Photorealistic Simulation for Robust Semantic Driving Scene Understanding" in 2023. |
|
Outstanding Reviewer ECCV 2022. Honored as one of the top 215 reviewers for European Conference on Computer Vision (ECCV) 2022 from a total of 4719 reviewers. |