I am a Ph.D. candidate at
Computer Vision Lab,
ETH Zurich supervised by
Prof. Luc Van Gool.
My current research focuses on multi-sensor scene understanding in adverse weather conditions. Specifically, the focus of my research is on multi-modal fusion for robust semantic understanding of driving scenes. I take part in the EFCL project Sensor Fusion, in which we develop adaptive sensor fusion architectures for high-level visual perception. Before joining the Computer Vision Lab, I recieved an MSc in "Robotics, Systems and Control" and a BSc in "Mechanical Engineering", both at ETH Zurich.
Publications

|
DGFusion: Depth-Guided Sensor Fusion for Robust Semantic Perception
Tim Brödermann,
Christos Sakaridis,
Luigi Piccinelli,
Wim Abbeloos,
and Luc Van Gool
arXiv preprint, 2025
[PDF]
[Code]
[BibTeX]
[arXiv]
|
|
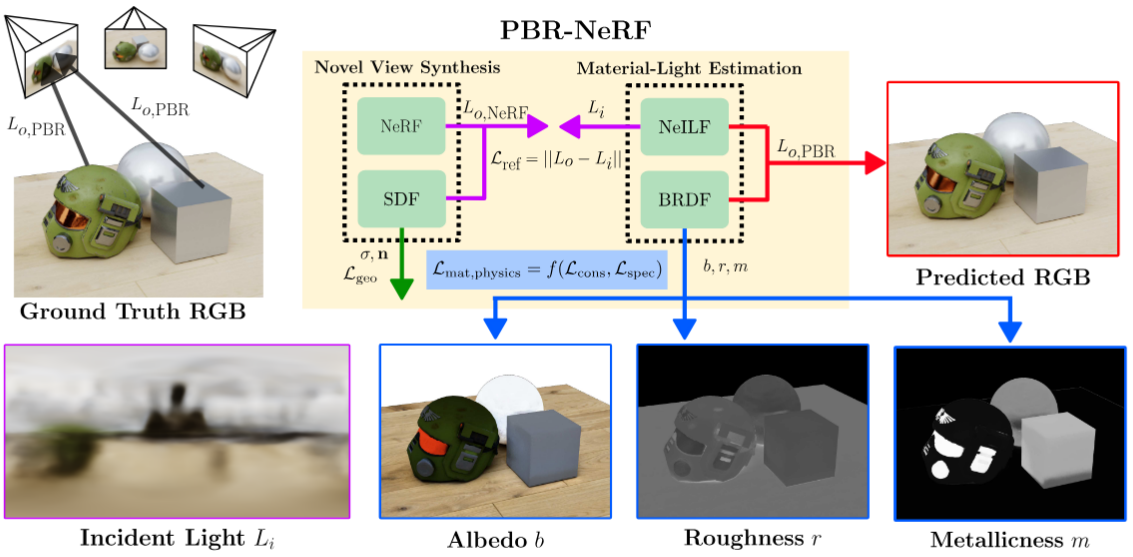
PBR-NeRF: Inverse Rendering with Physics-Based Neural Fields
Sean Wu, Shamik Basu, Tim Broedermann
Luc Van Gool, and
Christos Sakaridis
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025
[PDF]
[Code]
[BibTeX]
[arXiv]
|
|
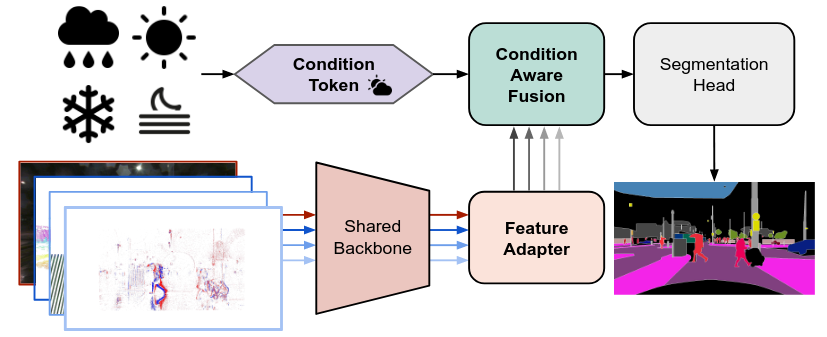
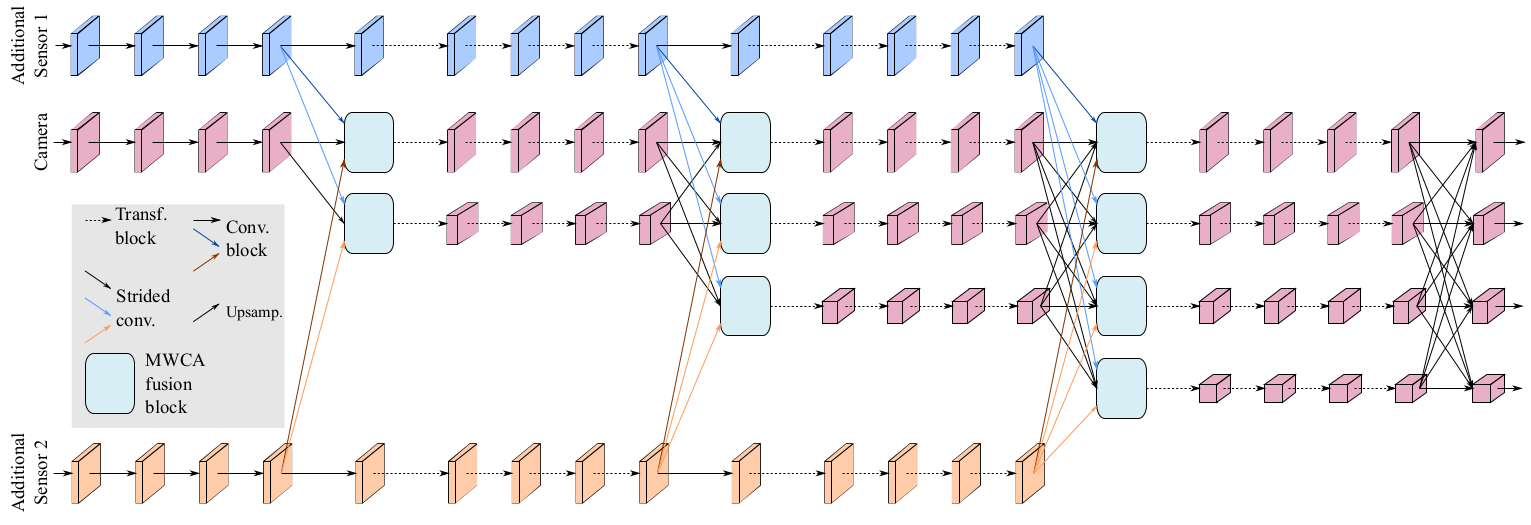
CAFuser: Condition-Aware Multimodal Fusion for Robust Semantic Perception of Driving Scenes
Tim Broedermann,
Christos Sakaridis,
Yuqian Fu,
and Luc Van Gool
IEEE Robotics and Automation Letters (RA-L), 2025
[PDF]
[Code]
[BibTeX]
[arXiv]
|
|
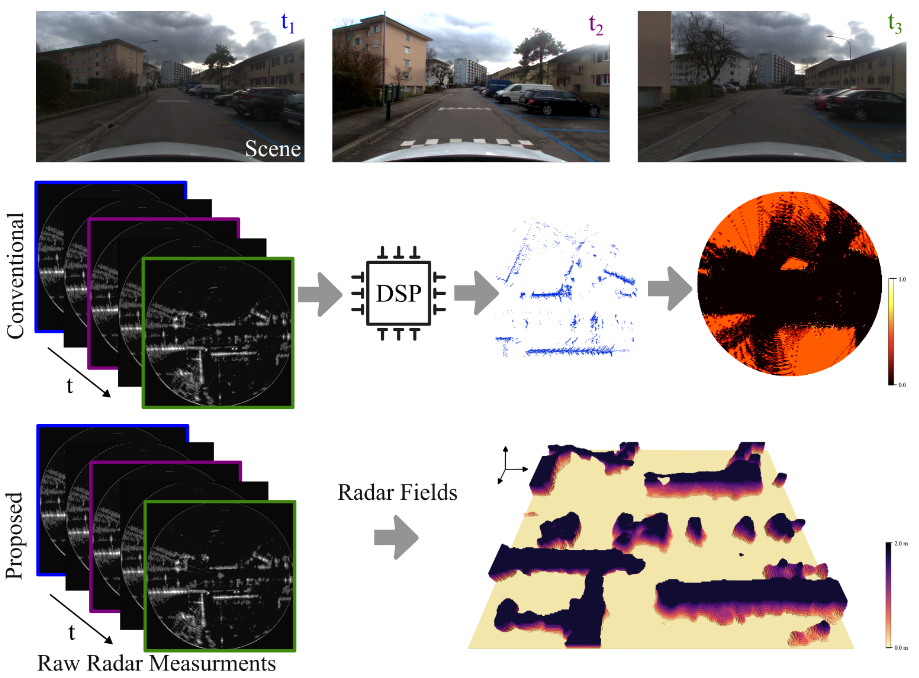
Radar Fields: Frequency-Space Neural Scene Representations for FMCW Radar
David Borts,
Erich Liang,
Tim Broedermann,
Andrea Ramazzina,
Stefanie Walz,
Edoardo Palladin,
Jipeng Sun,
David Bruggemann,
Christos Sakaridis,
Luc Van Gool,
Mario Bijelic,
and Felix Heide
SIGGRAPH, 2024
[PDF]
[Code]
[BibTeX]
[arXiv]
|

|
MUSES: The Multi-Sensor Semantic Perception Dataset for Driving under Uncertainty
Tim Broedermann,
David Bruggemann,
Christos Sakaridis,
Kevin Ta,
Odysseas Liagouris,
Jason Corkill,
and Luc Van Gool
Proceedings of the European Conference on Computer Vision (ECCV), 2024
[PDF]
[Code]
[SDK]
[Webpage]
[BibTeX]
[arXiv]
|
|
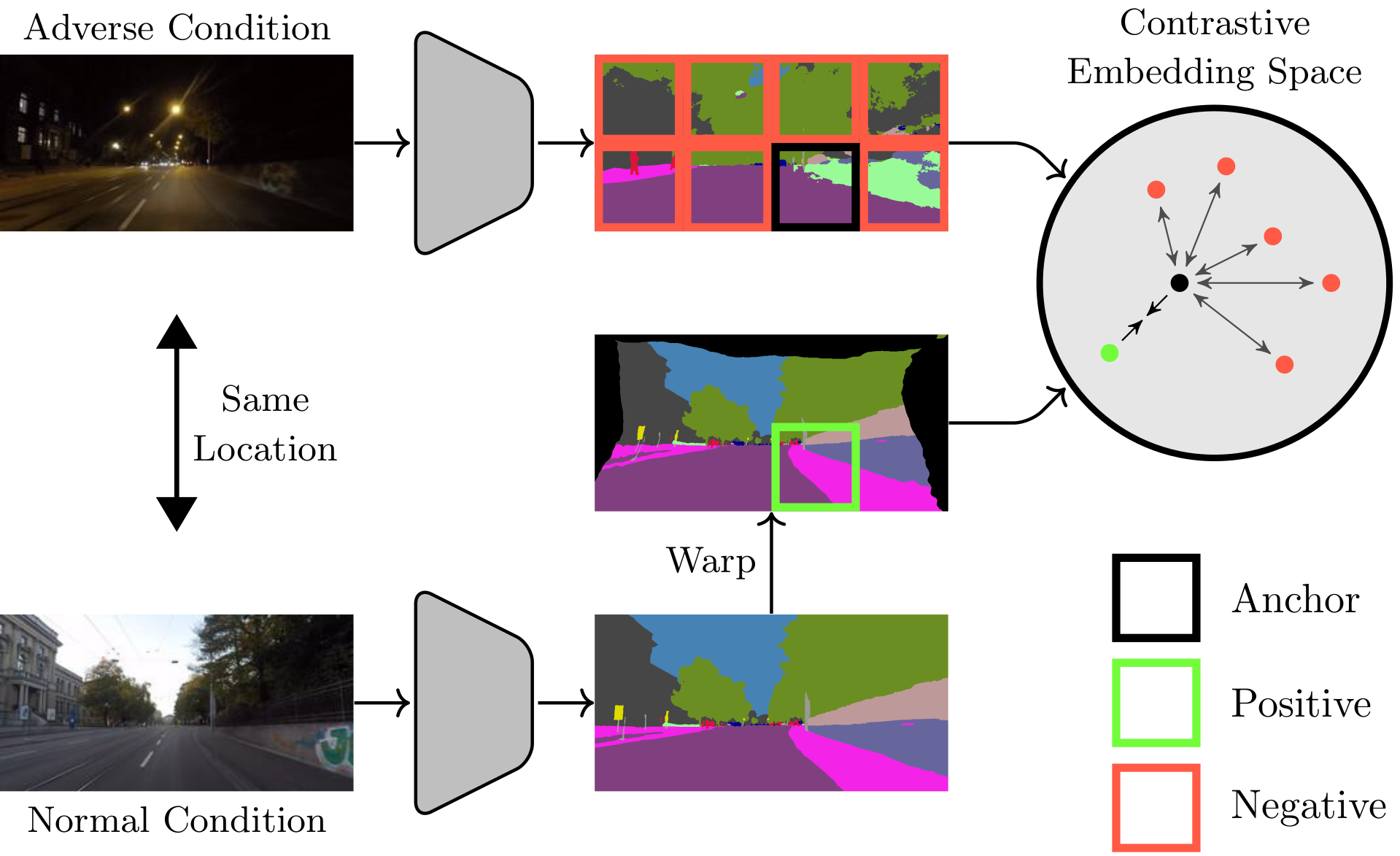
Contrastive Model Adaptation for Cross-Condition Robustness in Semantic Segmentation
David Bruggemann,
Christos Sakaridis,
Tim Broedermann,
and Luc Van Gool
IEEE/CVF International Conference on Computer Vision (ICCV), 2023
[PDF]
[Code]
[BibTeX]
[arXiv]
|
|
HRFuser: A Multi-resolution Sensor Fusion Architecture for 2D Object Detection
Tim Broedermann,
Christos Sakaridis,
Dengxin Dai,
and Luc Van Gool
IEEE International Conference on Intelligent Transportation Systems (ITSC), 2023
[PDF]
[Code]
[BibTeX]
[arXiv]
|
|
Lasers to Events: A Flexible Automatic Method for 6-DoF Extrinsic Calibratio nof Lidars and Event Cameras
Kevin Ta,
David Bruggemann,
Tim Broedermann,
Christos Sakaridis,
and Luc Van Gool
IEEE International Conference on Robotics and Automation (ICRA), 2023
[PDF]
[Code]
[BibTeX]
[arXiv]
|

|
An Adaptive Landing Gear for Extending the Operational Range of Helicopters
Boris Stolz,
Tim Broedermann,
Enea Castiello,
Gokula Englberger,
Daniel Erne, ...
Marco Hutter
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
[PDF]
[BibTeX]
[IEEE]
|
Teaching
Teaching assistant: Computer Vision and Artificial Intelligence for Autonomous Cars at ETH Zurich in 2024/25.
Head teaching assistant: Computer Vision and Artificial Intelligence for Autonomous Cars at ETH Zurich in 2023/24.
Head teaching assistant: Projekte & Seminare: Vision and Control in RoboCup at ETH Zurich in 2022.
Teaching assistant: Deep Learning for Autonomous Driving at ETH Zurich in 2021 and 2022.
Teaching assistant: Werkstoffe und Fertigung I+II at ETH Zurich in 2016 and 2017.
Contact
Computer Vision Laboratory
Sternwartstrasse 7
ETH Zentrum
CH - 8092 Z�rich, Switzerland
|
Office: ETF D 115
E-mail: tim.broedermann[at]vision.ee.ethz.ch
|
