A Gas Actuated Hopping Machine
Physical system
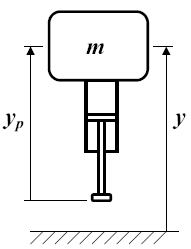
The gas actuated hopping machine is driven by a penumatic
actuator, with the location of the
piston relative to the mass under no external loading defined as
yp. After contact occurs with the
ground with
y<=yp, the upward force on the mass from
actuator can be approximated by a linear
spring with
F = k(yp-y); where
k is the spring constant.
The position yp can be viewed as the
unstretched spring length and it can be easily changed by pumping air
into or out of either side of the cylinder.
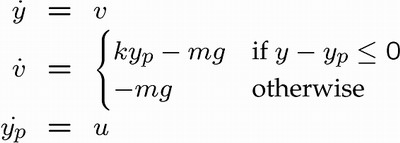
The equations of motion for the mass are
The system is subject to constraints on maximal and minimal piston
position
yp, as well as on the control input
u.
Behavior of the system shows clear hybrid characteristics, since the
force
F takes non-zero values if the machine hits the ground,
otherwise the external force due to the piston has no effect on the
machine movement.
Control objectives
The control objective is to make the machine hopping, reaching a given
jump height. Moreover, we would like the controller to manipulate
the external input u(t) in such a way, such that the machine
is driven to a respective reference as quickly as possibly, i.e. in
minimum time.
Modelling in HYSDEL
A simple Euler approximation can be used to discretize the equations of
motions. Then the following HYSDEL model describes behavior of the
hopping machine under different operating conditions:
SYSTEM hopper {
INTERFACE {
STATE {
REAL y [0, 30]; /* mass height */
REAL speed [-30, 30]; /* mass speed */
REAL yp [0, 5]; /* piston position */
}
INPUT {
REAL u [-20, 20]; /* air inflow */
}
OUTPUT {
REAL height; /* output = mass height */
}
PARAMETER {
REAL dt = 0.1; /* sampling time */
REAL k = 500; /* spring constant */
REAL m = 1; /* mass */
REAL g = 386 * dt; /* acceleration due to gravity */
}
}
IMPLEMENTATION {
AUX {
/* auxiliary variables */
BOOL groundhit;
REAL aux_speed;
}
AD {
/* the 'groundhit' variable will be true iff we hit the ground */
groundhit = y - yp <= 0;
}
DA {
aux_speed = {
IF groundhit THEN
/* when the machine hits the ground, additional
upwards force is generated due to the piston */
dt*(k*yp - g)
ELSE
/* while in the air, only gravity affects the motion */
-dt*g + speed
};
}
CONTINUOUS {
/* state update equations */
y = dt*speed + y;
speed = aux_speed;
yp = dt*u + yp;
}
OUTPUT {
height = y;
}
}
}
Controller design in MPT
In order to design a model-based controller with MPT, we first
need to define model of the dynamical system. We can do that
by importing the HYSDEL model and converting it into an
equivalent Piecewise-Affine (PWA) model:
>> Ts = 0.1; % sampling time
>> model = mpt_sys('hopper.hys', Ts);
The command mpt_sys will read description of
the system stored in file hopper.hys and convert
it into an PWA model.
Second step is to define system constraints:
>> model.ymax = 30; % maximum height of mass
>> model.ymin = 0; % minimum height of mass
>> model.umax = 20; % maximum allowed airflow to piston
>> model.umin = -20; % minimum allowed airflow to piston
Now we can define the optimization problem. Our objective is to
design a controller which drives the mass into a given reference
position in minimum time. Therefore the first step is to define
a minimum-time control problem:
>> problem.subopt_lev = 1; % use minimum-time strategy
>> problem.N = Inf; % for minimum-time problems
>> problem.norm = 2; % use quadratic cost function
>> problem.Q = diag([0 0.1 0]); % penalty on states
>> problem.R = 1; % penalty on input
In addition, we need to specify a target region, to which
system states will be driven. Such region in our case is given
by following inequalities:
19.8 <= y(k) <= 20.2
-5 <= v(k) <= 5
0 <= yp(k) <= 5
The first inequality says that the mass position should reach a range
between 19.8 and 20.2 inches. Second term specifies that once the
mass is at a given reference, it's speed should not exceed +/- 5 inches/sec.
Finally, the third inequality says that the piston position should
not exceed given bounds.
The inequalities above can be translated into a polytope:
>> H = [eye(3); -eye(3)];
>> K = [20.2; 5; 5; -19.8; 5; 0];
>> problem.Tset = polytope(H, K); % target set
Once the model and the problem are given, the controller can
be obtained by
>> controller = mpt_control(model, problem);
Results and simulations
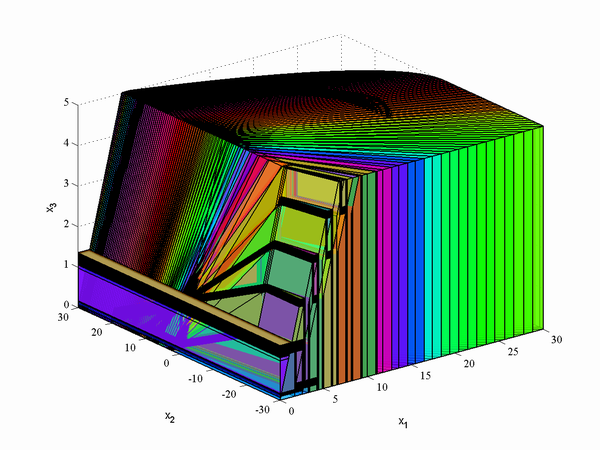
For the parameters specified above, the controller consists of
326 regions in 3D state-space, which can be plotted using
>> plot(controller)
The controller can now be either used for simulations, or
exported to C-code for embeding into the real application.
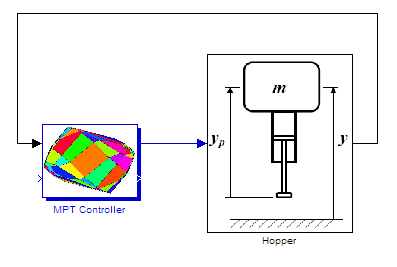
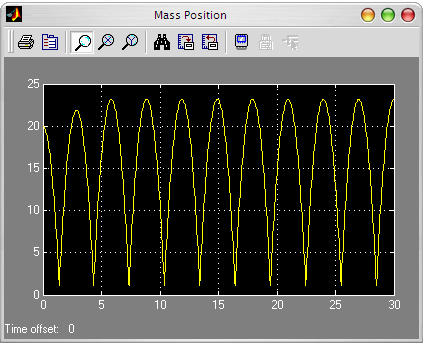
In this demonstration we simulate the closed-loop system
on a non-linear model of the hopping machine in Simulink:
which leads the following closed-loop response: