Publication
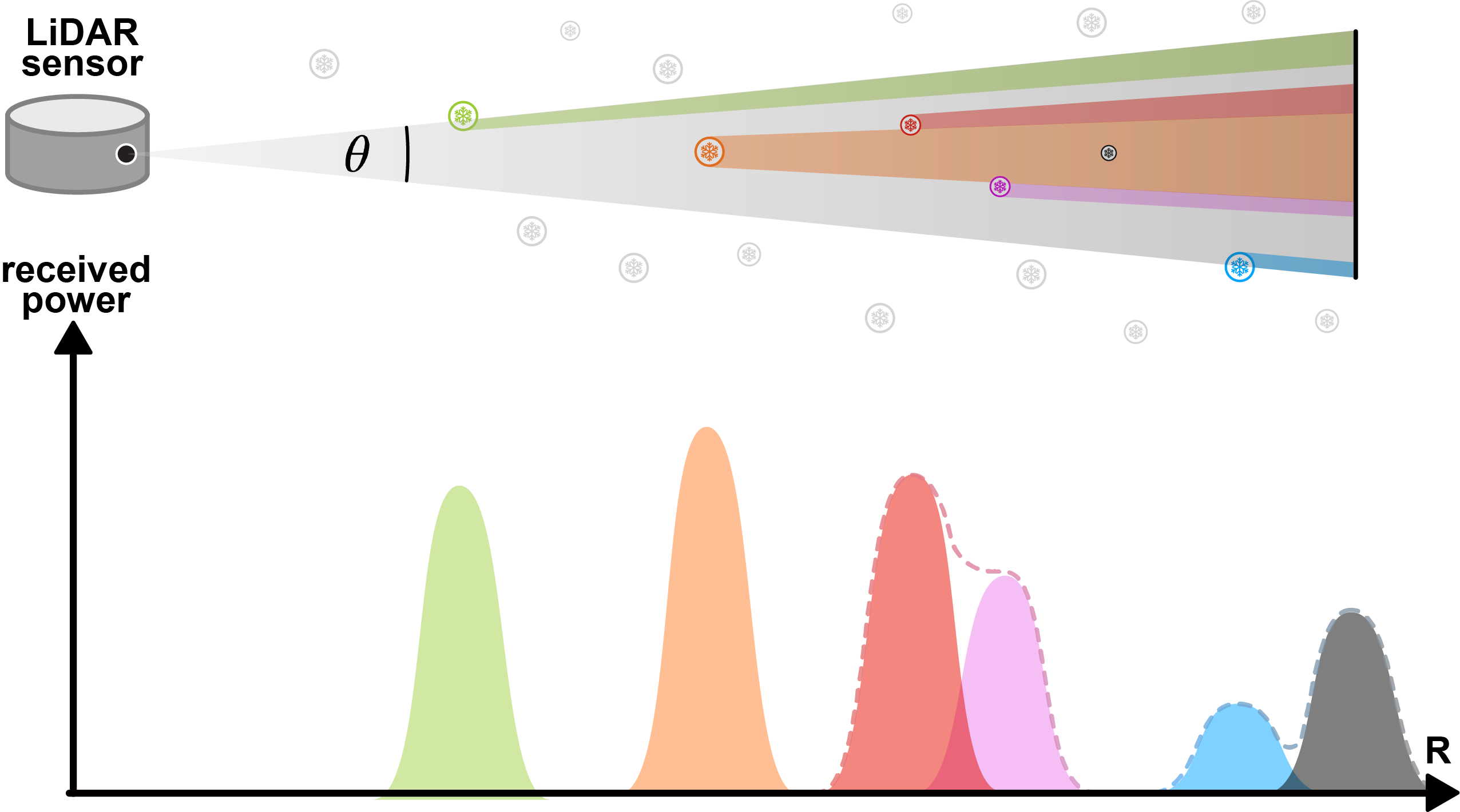
LiDAR Snowfall Simulation for Robust 3D Object Detection
Martin Hahner,
Christos Sakaridis,
Mario Bijelic,
Felix Heide,
Fisher Yu,
Dengxin Dai,
and Luc Van Gool
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022 - Oral
[PDF]
[Code]
[BibTeX]
[arXiv]
[Supplement]
Pretrained Models
We provide the central models which we have trained in the experiments of our paper on our simulated snowfall+wet ground, i.e., PV-RCNN, VoxelRCNN-Car, CenterPoint, Part-A2, PointRCNN, SECOND, and PointPillars. Each of these seven architectures is trained three different times and in each of the following zip files all three models corresponding to these three different training runs are included. The performance reported in the paper for each architecture is the average of the performances of the three individual models corresponding to that architecture.
- PV-RCNN_snowfall_simulation_3_models-reported_performance_is_their_average_performance.zip
- VoxelRCNN-Car_snowfall_simulation_3_models-reported_performance_is_their_average_performance.zip
- CenterPoint_snowfall_simulation_3_models-reported_performance_is_their_average_performance.zip
- PartA2_snowfall_simulation_3_models-reported_performance_is_their_average_performance.zip
- PointRCNN_snowfall_simulation_3_models-reported_performance_is_their_average_performance.zip
- SECOND_snowfall_simulation_3_models-reported_performance_is_their_average_performance.zip
- PointPillars_snowfall_simulation_3_models-reported_performance_is_their_average_performance.zip
Citation
Please cite our publication if you use our snowfall and/or wet ground simulation, models, or code in your work.