MPT 2.5 Changelog
Hybrid Identification Toolbox included (pre release 0.95)
The
Hybrid Identification Toolbox (HIT) by
Giancarlo Ferrari-Trecate
can solve two types of problems:
- Regression problem: reconstruct a PWA map from noisy samples.
In this case,
one is not dealing with a dynamical system (with inputs and outputs) but just
with a static map that is sampled. HIT gives you back a data-based PWA
approximation of the map (see the examples
ex_approx_1d.m
and ex_cake1.m - the second example shows how to approximate
discontinuous PWA maps). The approximation
has idmodes.s modes (in HITs jargon, a "mode" is an affine hyperplane + the
region where is valid).
-
Identification problem:
reconstruct a PWARX hybrid system from noisy inputs
and outputs (see for instance
ex_pwarx_2d_3modes.m).
PWARX systems are multi-input/single-output descriptions of hybrid systems.
Thus no state appears. But they can be re-written as PWA system pretty much
the same way ARX models can be re-written as linear systems in the
state-space form.
The PWARX systems used in the HIT toolbox are of the form
y(k)=idmodes.par{i}* [x(k)' 1]' if x(k) \in \idmodes.regions(i)
where x(k)=[y(k-1) ... y(k-na) u'(k-1) ... u'(k-nb)]' is the vector of
regressors and the integers na and nb are the system order. If you want to write a
PWARX model in the PWA form you have to interpret
x(k) as a state, y(k) as an output and find the matrices A_i,
b_i, f_i, C_i,
D_i, g_i that given a sequence u(k) produce the same output of the PWARX
model.
The Hybrid Identification Toolbox can be found in the
mpt/hit directory of your MPT installation.
Required software: MATLAB 6.5 (or higher).
Ellipsoidal Toolbox included
The
Ellipsoidal Toolbox by
Alex Kurzhanskiy is a standalone
set of easy-to-use
configurable MATLAB routines to perform operations with
ellipsoids and hyperplanes of arbitrary dimensions. It
computes the external and internal ellipsoidal approximations
of geometric (Minkowski) sums and differences of ellipsoids,
intersections of ellipsoids and intersections of ellipsoids
with halfspaces and polytopes; distances between ellipsoids,
between ellipsoids and hyperplanes, between ellipsoids and
polytopes; and projections onto given subspaces.
Ellipsoidal methods are used to compute forward and backward
reach sets of continuous- and discrete-time piecewise affine
systems. Forward and backward reach sets can be also computed
for continuous-time piece-wise linear systems with
disturbances. It can be verified if computed reach sets
intersect with given ellipsoids, hyperplanes, or polytopes.
The toolbox provides efficient plotting routines for
ellipsoids, hyperplanes and reach sets.
You will find the Ellipsoidal Toolbox in the
mpt/ellipsoids directory of your MPT installation.
To start, have a look at
ell_demo1,
ell_demo2 and
ell_demo3 demos.
Required software: MATLAB 6.5 (or higher).
Latest release of YALMIP included
YALMIP
by
Johan Löfberg
is a MATLAB toolbox for rapid prototyping of
optimization problems. The package initially focused on
semi-definite programming, but the latest release extends
this scope significantly. YALMIP can now be used for:
- convex linear, quadratic, second order cone and
semidefinite programming.
- non-convex quadratic and semidefinite programming
(local & global).
- mixed integer conic programming.
- multi-parametric parametric programming.
- geometric programming.
The latest relase of YALMIP has improved integration between YALMIP and MPT.
YALMIP adds a layer above the algorithms in MPT, allowing you to, e.g.,
symbolically define and solve multi-parametric linear programs with binary
variables, and easily construct dynamic programming based algorithms.
Additionally, YALMIP adds support for working with piecewise affine
functions in a symbolic fashion. Read more about this in the YALMIP manual
(type
open('yalmip.htm') in MATLAB.)
YALMIP can be found in the
mpt/yalmip directory
of your installation. You can learn more about YALMIP by looking on
its demos; just run
yalmipdemo and enjoy.
Optimal control of PWA systems with quadratic stage cost
MPT 2.5 introduces support for quadratic cost function in optimal
control of PWA systems which means that the probStruct.subopt_lev=0,
probStruct.norm=2 combination is now allowed. The computation
is based on mpMIQPs and supports systems with boolean/integer inputs, multiple
target sets, time varying penalties, etc. Example:
>> two_tanks % 2D PWA system with one continuous and one boolean input
>> probStruct.N = 2; % prediction horizon
>> probStruct.norm = 2; % use quadratic performance index
>> ctrl = mpt_control(sysStruct, probStruct);
The optimal control problems are formulated using
YALMIP and are then solved
as multi-parametric
mixed-integer quadratic programs. Currently it is not possible to export such controllers
into C-code, but you can still use them in Simulink simulations.
mpMILP and mpMIQP solvers
Mixed-Integer LP/QP problems can now be solved in the multi-parametric
fashion in MPT 2.5 by
mpt_mpmilp and
mpt_mpmiqp,
respectively. The functions take the same
Matrices arguments
as
mpt_mplp/
mpt_mpqp do, with two additional fields:
Matrices.vartype - a vector of characters C,
B or A which denotes whether the i-th variable
should be considered as continuous (Matrices.vartype(i)='C'),
or as boolean (Matrices.vartype(i)='B'), or whether the given
variable should only take values from a finite alphabet
(Matrices.vartype(i)='A').
Matrices.alphabet - for those variables which have been marked
to belong to a finite alphabet (Matrices.vartype(i)='A'),
Matrices.alphabet{i}=[a1 a2 ... an] lists all possible values which
a given variable can take.
The solution of an mpMILP is a non-overlapping partition, whereas
overlapping regions are returned for mpMIQPs.
Example:
>> Double_Integrator
>> probStruct.N = 2;
>> probStruct.norm = 2; % leads to an mpMIQP
>> Matrices = mpt_constructMatrices(sysStruct, probStruct);
% 1st input can only take values -1, 0, or 1
>> Matrices.vartype(1) = 'A';
>> Matrices.alphabet{1} = [-1 0 1];
% 2nd input should be boolean (0/1)
>> Matrices.vartype(2) = 'B';
% solve the mpMIQP
>> solution = mpt_mpmiqp(Matrices);
>> plot(solution.Pn)
All praise for these two functions goes to Johan Löfberg and his
YALMIP.
Evaluate controllers as functions
In order to obtain a control input for a given value of the
state vector, it is now possible to evalute the controller
object as a function, i.e.:
>> u = ctrl(x0)
will do the same thing as calling
>> u = mpt_getInput(ctrl, x0)
This approach works for explicit as well as for
on-line MPC controllers. You can also pass additional options
if you want to:
>> u = ctrl(x0, Options)
Improved simulation functions
MPT 2.5 introduces two new functions for simulation of explicit
and on-line controllers. The first one is the sim()
function which replaces mpt_computeTrajectory:
>> Double_Integrator
>> ctrl = mpt_control(sysStruct, probStruct);
>> x0 = [2; 0]; % initial state
>> [X, U, Y] = sim(ctrl, x0);
>> X
X =
2.0000 0
1.0000 -0.5000
0.4502 -0.5249
0.1847 -0.3952
0.0650 -0.2575
0.0157 -0.1533
-0.0016 -0.0854
-0.0059 -0.0448
-0.0055 -0.0222
-0.0040 -0.0103
-0.0025 -0.0044
-0.0015 -0.0017
-0.0008 -0.0005
To compute the evolution of a given dynamical system subject
to a given control policy, sim(), by default, uses the
system structure which is stored in the controller object (ctrl.sysStruct).
It is, however, possible to specify a different dynamical system
when simulating the closed-loop. In this example we use a different
system structure when computing the evolution of the states in the
closed-loop:
>> sysStruct.A = 0.9*sysStruct.A; % modify the system dynamics
>> X = sim(ctrl, sysStruct, x0)
It is also possible to specify arbitrary dynamical systems in
the sim function. To use this feature, first create
your own function which takes x(k) and u(k) as inputs and generates
x(k+1) and y(k) as outputs:
function [xnext, yk] = di_sim_fun(xk, uk)
A = [1 1; 0 1]; B = [1; 0.5]; C = [1 0];
xnext = A*xk + B*uk;
yk = C*xk;
Once such function exists, you can use it as a function handle
when calling sim:
>> X = sim(ctrl, @di_sim_fun, x0)
The nice property of this feature is that you can easily simulate
a given controller in connection with a non-linear plant which is
specified in discrete-time domain. For more information, see
help mptctrl/sim.
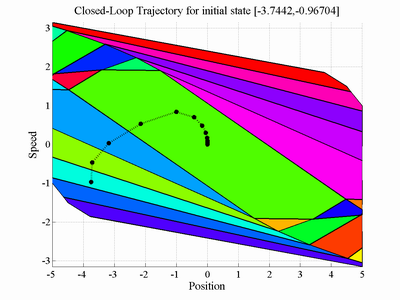
The simplot function replaces
mpt_plotTrajectory and mpt_plotTimeTrajectory
and can thus be used to visualize closed-loop trajectories. If the initial
state x0 is not specified and the controller is in 2D, the
function will allow you to specify the initial state by mouse, e.g.
>> Double_Integrator
>> ctrl = mpt_control(sysStruct, probStruct);
>> simplot(ctrl)
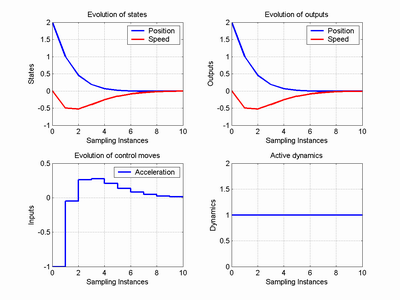
If x0 is specified, simplot will plot the evolution
of states, inputs and outputs versus time, e.g.
>> Double_Integrator
>> ctrl = mpt_control(sysStruct, probStruct);
>> x0 = [2; 0];
>> simplot(ctrl, x0)
Again, it is possible to specify a different system dynamics by
either providing your own sysStruct or giving a handle
of a function which should be used to compute the state update:
>> Double_Integrator
>> ctrl = mpt_control(sysStruct, probStruct);
>> x0 = [2; 0];
>> simplot(ctrl, @di_sim_fun, x0)
For more information about this function, see help mptctrl/simplot.
Support for lower-dimensional noise polytopes
MPT now supports lower-dimensional noise polytopes! If you want
to define noise only on a subset of system
states, you can now do so by defining sysStruct.noise
as a set of vertices representing the noise. Say you want
to impose a +/- 0.1 noise on x1,
but no noise should be used
for x2. You can do that by:
>> sysStruct.noise = [-0.1 0.1; 0 0];
Just keep in mind that the noise polytope must have vertices
stored column-wise.
MEX files for the GLNXA64 platform
Thanks to Marco Laumanns, MPT now includes all necessary
MEX files compiled for the
GLNXA64 (64-bit Linux for AMP processors) platform.
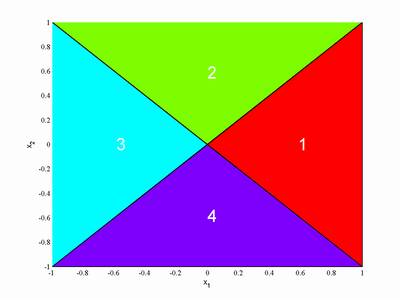
More detailed display of system structures
The command mpt_sysStructInfo is now extended
to display detailed information about a given linear or
hybrid systems. To use the new feature, call the function with
no output arguments, e.g.
>> pwa_DI
>> mpt_sysStructInfo(sysStruct)
which will generate the following output:
PWA system (4 dynamics), 2 states, 1 input, 2 outputs
Guards of dynamics 1:
x(1) >= 0
x(2) >= 0
Guards of dynamics 2:
x(1) <= 0
x(2) <= 0
Guards of dynamics 3:
x(1) <= 0
x(2) >= 0
Guards of dynamics 4:
x(1) >= 0
x(2) <= 0
Execute arbitrary functions on each element of a polytope array
PELEMFUN(@FHANDLE, Pn, [X1, ..., Xn]) evaluates a function defined by
the function handle FHANDLE on all elements of the polytope array
Pn.
Additional input arguments X1,...,Xn can be specified
as well. A couple of examples:
E = pelemfun(@extreme, Pn) returns the extreme points of all polytopes
stored in the polytope array Pn as a cell array:
>> p = unitbox(2);
>> P = [p p+[1; 0] p+[-1; 0]];
>> E = pelemfun(@extreme, P)
E =
[4x2 double] [4x2 double] [4x2 double]
>> E{1}
ans =
1 -1
1 1
-1 1
-1 -1
[X, R] = pelemfun(@chebyball, Pn) returns centers and radii of the
chebychev ball of each element of Pn:
>> [X, R] = pelemfun(@chebyball, P)
X =
[2x1 double] [2x1 double] [2x1 double]
R =
[1] [1] [1]
B = pelemfun(@bounding_box, Pn, struct('Voutput', 1)); V = [B{:}]
returns bounding boxes of all elements of Pn converted to a matrix.
I = pelemfun(@le, Pn, Q) returns a cell array of logical statements
with true value at position "i" if Pn(i) is a subset of Q:
>> I = pelemfun(@le, P, unitbox(2, 1.5));
>> [I{:}]
ans =
1 0 0
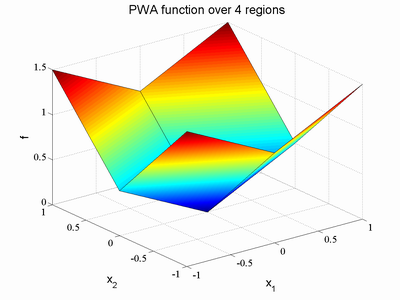
Convert a linear norm into a PWA function
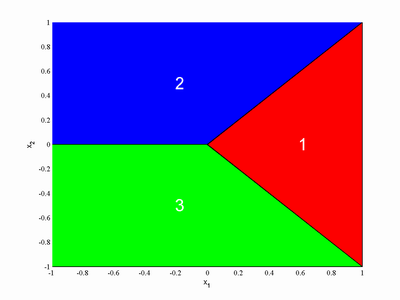
The new function mpt_norm2pwa
transforms a linear norm ||P*x||_l into an equivalent PWA function,
||P*x||_l = pwafcn.Bi{i}*x + pwafcn.Ci{i} for x \in pwafcn.Pn(i).
Example:
>> P = diag([0.5 1]); % scaling matrix
>> N = 1; % transform the 1-norm
>> Pn = unitbox(2); % only look for a solution inside of this box
>> pwafcn = mpt_norm2pwa(P, N, struct('Pn', Pn));
>> mpt_plotPWA(pwafcn.Pn, pwafcn.Bi, pwafcn.Ci);
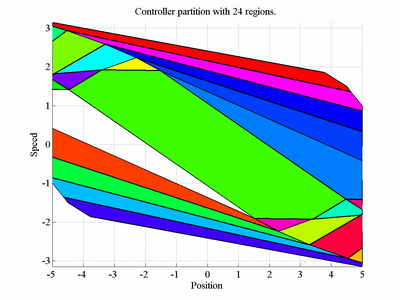
Allow to deal with holes in explicit solutions
If a hole is present in an explicit solution, you can now
tell mpt_getInput to take the control law of
the nearest neighboring region if a state lies in the hole.
To use this feature, you must set Options.recover=1,
i.e.
>> Double_Integrator
>> ctrl = mpt_control(sysStruct, probStruct); % compute the explicit controller
>> Pfinal = ctrl.Pfinal; % record feasible set
>> ctrl = modify(ctrl, 'remove', 2); % remove 2nd region
>> ctrl = set(ctrl, 'Pfinal', Pfinal); % set back the feasible set
>> plot(ctrl)
Here we see that our explicit controller contains a hole, so there is no
control law defined for the initial state
x0 = [-5; 1]:
>> u = mpt_getInput(ctrl, [-5; 1])
MPT_GETINPUT: NO REGION FOUND FOR STATE x = [-5 1]
u =
[]
However, with the recovery mode turned on, we take the control law
of the nearest neighbor:
>> Options.recover = 1;
>> u = mpt_getInput(ctrl, [-5; 1], Options)
MPT_GETINPUT: State x = [-5 1] lies in a hole, taking the nearest neighbor
u =
1
New function to compute the list of adjacent polytopes
The new function mpt_buildAdjacency now allows
to compute which polytopes of a given polytope array are
adjacent, i.e. which of them share a common facet. See
help mpt_buildAdjacency for more details.
Small example:
>> p1 = unitbox(2);
>> p2 = unitbox(2) + [2; 0];
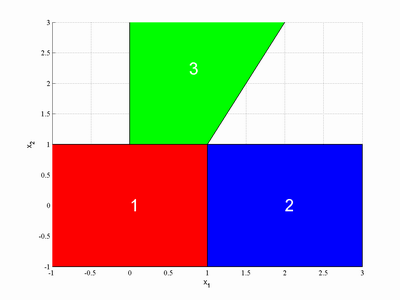
>> p3 = polytope([0 1; 0 3; 1 1; 2 3]);
>> P = [p1 p2 p3];
>> plot(P); identifyRegion(P)
>> adj = mpt_buildAdjacency(P);
>> adj{1}
ans =
2 0
3 -Inf
-Inf 0
-Inf 0
this output means that polytope p1 and polytope p2
share a common facet, so do polytopes p1 and p3.
>> adj{3}
ans =
1
-Inf
-Inf
-Inf
and this shows that polytope p3 is only adjacent to
polytope p1, but not to p2. Have a look
at help mpt_buildAdjacency for more information.
Improved computation of maximum attractive sets
The function
mpt_maxCtrlSet has undergone a major
revision:
- Sets obtained at each iteration can now be returned
- Computation of maximal attractive sets can now be
aborted prematurely if convergence is very slow (have a look
at
help mpt_maxCtrlSet and look at
Options.Vconverge
- Custom problem structure can now be passed
(
Options.probStruct)
Allow to disable the construction of a simulator when importing
HYSDEL models
mpt_sys now allows to disable the construction of a simulator
when hybrid systems modeled by HYSDEL are imported. To use
this feature, call mpt_sys with an additional
'nosimulator' input argument:
>> sysStruct = mpt_sys('hysdelfile', 'nosimulator')
This is especially handy when you want to use the generated
model only for on-line MPC of systems which are not well defined.
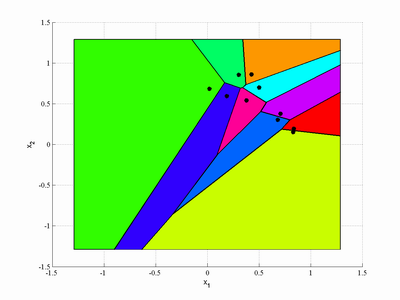
Sort voronoi cells according to seed points
P=mpt_voronoi(S) now returns the regions sorted in a way
such that region P(i) corresponds to seed point
S(i, :). Example:
>> S = rand(5, 2); % 5 random seed points in 2D
>> V = mpt_voronoi(S); % compute the voronoi cells
>> [isin, inwhich] = isinside(V, S(1, :)'); inwhich
inwhich =
1
>> [isin, inwhich] = isinside(V, S(2, :)'); inwhich
inwhich =
2
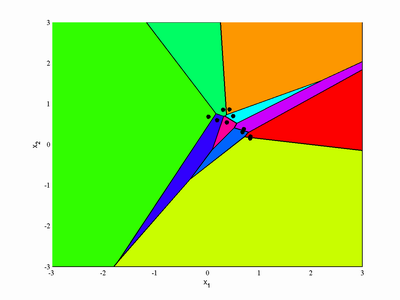
Allow to specify a "bounding polytope" when computing
Voronoi cells
P=mpt_voronoi(S) now allows you to specify a
"bounding polytope", i.e. the polytope inside of which
the Voronoi cells should be computed.
% generate 10 random seed points in 2D
>> S = rand(10, 2);
% compute voronoi cells without specifying a bounding polytope
>> V = mpt_voronoi(S);
% look for solution inside of a box with sides of +/- 3
>> Options.pbound = unitbox(2, 3);
% compute the Voronoi cells
>> P = mpt_voronoi(S);
Allow to specify the
type of Lyapunov function to compute for one-step controllers
When constructing a one-step solution for PWA systems
(
probStruct.subopt_lev=2), MPT now allows
to specify which type of Lyapunov function should be
used to testify stability of the closed-loop system. The
Lyapunov function can now be specified in
Options.lyapunov_type which can take the
following strings:
Options.lyapunov_type='any' - let MPT
decide which one to use (usually a PWQ Lyapunov function
will be usedOptions.lyapunov_type='pwq' -
compute a Piecewise Quadratic Lyapunov functionOptions.lyapunov_type='pwa' -
compute a Piecewise Affine Lyapunov functionOptions.lyapunov_type='none' -
don't compute any Lyapunov function (the closed-loop
system can be unstable!)
Easy detection of overlaps
Assume you have a polytope array and want to find out which polytopes do
intersect. Now you can do
>> p1 = unitbox(2);
>> p2 = unitbox(2)+[1; 0];
>> p3 = unitbox(2)+[-1; 0];
>> p = [p1 p2 p3];
>> [r, ia, ib, iab] = dointersect(P, P);
>> iab
iab =
1 1
1 2
1 3
2 1
2 2
3 1
3 3
and this output tells you that p1 intersects with p2
and p3, but p2 does not intersect with p3.
Improved facetcircle function
polytope/facetcircle now allows to pass the whole range of facets
to explore, e.g:
>> P = unitbox(3);
>> [x, r] = facetcircle(P, [1 3])
x =
1 0
0 0
0 1
r =
1 1
Notice that the centers of facets nos. 1 and 3 returned in x are
stored column-wise.
Function to compute a voronoi diagram for facets of a polytope
Similar to the idea of Voronoi diagrams one
can compute the partition of a polytope for which the set of points in a
polytope is closer to one facet than to all the others:
>> P = unitbox(2);
>> V = facetvoronoi(P)
V=
Polytope array: 4 polytopes in 2D
>> plot(V)
Here
V(i) is a polytope which contains
all points which
are closer to facet no.
i of
P than to any other facet.
A subset of facets to investigate can also be provided:
>> P = unitbox(2);
>> V = facetvoronoi(P, [1 2 4])
V=
Polytope array: 3 polytopes in 2D
>> plot(V)
New function to remove redundant entries of a polytope array
If your polytope array contains duplicate elements, you can now use
the overloaded function unique which will return only
unique elements of the array:
>> p1 = unitbox(2);
>> p2 = unitbox(2, 5);
>> P = [p1 p2 p1 p1 p2] % P contains redundant entries
P=
Polytope array: 5 polytopes in 2D
>> U = unique(P)
U=
Polytope array: 2 polytopes in 2D
>> U(1)==p1
ans =
1
>> U(2)==p2
ans =
1
Improved projection algorithms
A new projection method has been added - Options.projection=7.
When this algorithm is selected, the projection is solved as a multi-parametric
linear program (mpLP). This method is efficient especially when projecting to,
say, less than 5 dimensions. We have also improved other algorithms, mainly
increased numerical robustness of the ESP method (Options.projection=4)
and changed heuristics which decides which projection method best suits a particular
problem.
New options for plotting of polytopes
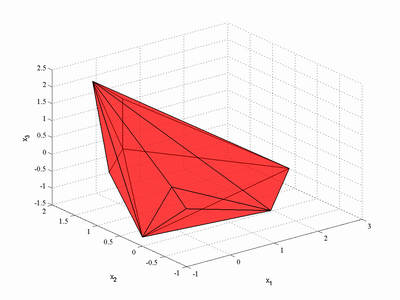
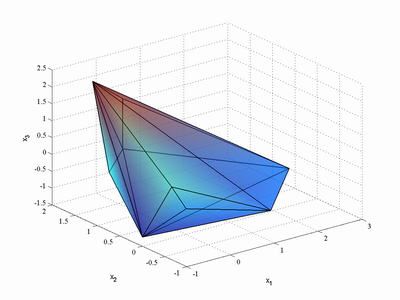
Gradient coloring can now be used when plotting 3D polytopes:
>> P = polytope(randn(10,3));
>> plot(P); % plot with gradient coloring disabled
>> plot(P, struct('gradcolor', 1)); % plot with gradient coloring enabled
Moreover, a colormap can now be specified when plotting polytope arrays:
>> plot(Pn, struct('colormap', 'summer'));
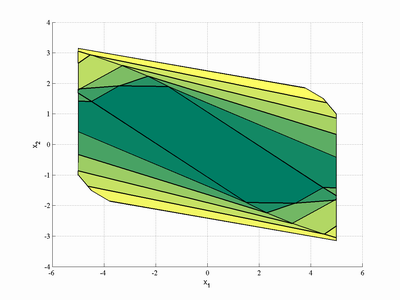
Improved plotting of piecewise affine and piecewise quadratic functions
Functions mpt_plotPWA and mpt_plotPWQ
have been extended to allow the user to specify
color of edges of patches (Options.edgecolor) and
level of transparency (Options.shade). The width of edge lines
can be specified by Options.edgewidth. Have a look
at respective help descriptions for more details.
>> mpt_plotPWA(Pn, Li, Ci, struct('shade', 0.6));
>> mpt_plotPWQ(Pn, Li, Ci, struct('edgecolor', 'w', 'edgewidth', 3));
Notable changes and bug fixes in the polytope library
-
polytope/bounding_box: allows to return all vertices of a
bounding box
polytope/bounding_box: change behavior with Options.noPolyOutput
polytope/extreme: allow rounding to increase numerical
robustness for CDD (Options.roundat)polytope/facetcircle: properly normalize vectors of normalspolytope/minus, polytope/plus: treat polytope arrays as a union
of polytopes, not as single polytopespolytope/mtimes: allow scaling even when origin is not included polytope/plot: supports Options.zvalue polytope/projection: fix problems with fourier-motzkin
C-implementationpolytope/projection: fix handling of dimensions which are not sorted polytope/reduce: always return correct keptrows polytope/reduce: preserve order of hyperplanespolytope/regiondiff: fix problems with Options.infbox being too
largepolytope/triangulate: properly update extreme pointspolytope/triangulate, polytope/volume: do not return
volume as a complex number
Other notable changes and bug fixes
mpt_computeTrajectory fixed computation of closed-loop cost for
systems with deltaU constraintsmpt_exportc: allows to specify name of output file mpt_getInput: don't check regions twice
mpt_infsetPWA: properly detect cases where invariant set is empty
mpt_invariantSet: speed improvements
mpt_invariantSet: allow to simplify intermediate steps using
greedy merging
mpt_init: improve speed
mpt_mplp: fix problems with cycling
mpt_mplp: fix random perturbations for 1D systems
mpt_mplp: fix problems with "xBeyond violates more than one bounds"
mpt_mpqp: improved handling of degeneracies
mpt_optControlPWA: fixed handling of 1D systems
mpt_optControlPWA: always return Pfinal as a polytope array
mpt_plotPWA, mpt_plotPartition,
mpt_plotU: respect user's choice of subplots
mpt_plotU: fixed handling of 1D systems with multiple inputs
mpt_solveQP: properly impose equality constraints for NAG QP solver
mpt_voronoi: make mpt_mplp() silent